La siguiente tabla muestra una propuesta de ordenadores bien montados y representativos de cada época, desde 1980 hasta 2015, pensados para recrearlos en entornos como PCem, 86Box, VirtualBox o simplemente para entender cómo era un PC equilibrado y potente en cada momento histórico.
🎧 Audio del tema Escucha este breve audio para repasar las ideas principales este proyecto.
Nota: no se trata siempre del equipo más caro del mercado, sino de una configuración realista, potente y coherente para su año.
Año
Microprocesador
RAM
Almacenamiento
Gráfica
Sonido
Unidad óptica / disquete
Sistema operativo recomendado
Uso típico
1980
Intel 8088 a 4.77 MHz
64 KB – 256 KB
Sin disco duro, 1 o 2 disqueteras de 5,25″
MDA o CGA
Altavoz interno
Disquetera 5,25″
PC DOS 1.0
Ofimática básica, programación, primeros juegos de PC
1985
Intel 80286 a 6–12 MHz
512 KB – 1 MB
Disco duro de 20–40 MB
EGA
Altavoz interno o tarjeta muy básica
Disquetera 5,25″ 1.2 MB
MS-DOS 3.1 / 3.2
Software profesional, bases de datos, juegos más avanzados
1990
Intel 80386DX a 33 MHz
4 MB
Disco duro de 80–120 MB
VGA
Sound Blaster 1.5 / Pro
Disquetera 3,5″ 1.44 MB
MS-DOS 5.0 + Windows 3.0 opcional
Juegos DOS, productividad, primeros entornos gráficos serios
1995
Intel Pentium 100 / 133 MHz
16 MB
Disco duro de 850 MB – 1.6 GB
SVGA PCI (1–2 MB VRAM)
Sound Blaster 16 / AWE32
Disquetera 3,5″ + CD-ROM 4x / 8x
MS-DOS 6.22 + Windows 95
Multimedia, CD-ROM, juegos DOS avanzados y primeros juegos Windows 95
2000
Pentium III 733 MHz o AMD Athlon 700–900 MHz
128 MB
Disco duro de 20–30 GB
NVIDIA GeForce 2 GTS o 3dfx Voodoo3 3000
Sound Blaster Live!
CD-ROM / DVD-ROM / CD-RW
Windows 98 SE o Windows 2000
Juegos 3D, internet, música MP3, software multimedia
2005
Pentium 4 3.0 GHz o Athlon 64 3200+
1 GB
Disco duro de 120–200 GB
GeForce 6600 GT / 6800 GT o Radeon 9800 Pro / X800
AC’97 o Sound Blaster Audigy
DVD-RW
Windows XP SP2
Juegos DirectX 8/9, internet, multimedia, grabación DVD
2010
Intel Core i5 750 o i7 860
4 GB
Disco duro de 500 GB
GeForce GTX 460 o Radeon HD 5850
HD Audio integrado
DVD-RW
Windows 7
Juegos modernos de la época, Steam, multimedia HD
2015
Intel Core i5 4690K o i7 4790K
8–16 GB
SSD de 250 GB + HDD de 1 TB
GTX 970 o Radeon R9 390
HD Audio integrado
DVD-RW opcional
Windows 10
Gaming moderno, productividad, edición, streaming
Comentarios por época
Año
Comentario histórico
1980
Ordenadores muy básicos, centrados en texto, programación y software profesional simple. Los juegos aún eran muy limitados.
1985
El PC empieza a consolidarse como herramienta seria de trabajo. El disco duro ya marca una gran diferencia.
1990
La época dorada del DOS empieza a despegar con fuerza. Aparecen mejores juegos, mejor sonido y los primeros entornos gráficos realmente utilizables.
1995
Uno de los momentos más interesantes del PC: convivencia entre DOS y Windows 95, explosión del CD-ROM y auge del PC multimedia.
2000
El 3D ya está plenamente asentado. Es una gran época para juegos clásicos de finales de los 90 y principios de los 2000.
2005
Windows XP domina claramente. Se consolida internet, los DVDs, el audio integrado y los juegos DirectX 9.
2010
El PC ya entra en una etapa muy moderna, con Windows 7 como sistema de referencia y el auge del juego digital.
2015
SSD, tarjetas gráficas potentes y Windows 10 marcan una plataforma ya completamente actual en muchos aspectos.
Configuraciones más recomendables para montar máquinas virtuales retro
Pentium II / III, 64–128 MB RAM, Voodoo3 o GeForce 2, Sound Blaster Live!, Windows 98 SE
VirtualBox
2005
1 GB RAM, 20–40 GB de disco virtual, Windows XP SP2 / SP3
VirtualBox
2010
2–4 GB RAM, disco virtual moderno, Windows 7
Selección ideal para un proyecto retro equilibrado
Si quieres montar varias máquinas para cubrir bien la evolución del PC, una selección muy buena sería esta:
Máquina
Representa
Sistema
1985
PC clásico de trabajo y primeros juegos avanzados
MS-DOS 3.x
1990
Época fuerte de DOS y primeros Windows
MS-DOS 5.0 + Windows 3.0
1995
Transición DOS / Windows 95 y explosión multimedia
Windows 95
2000
Auge del 3D y de los grandes clásicos de PC
Windows 98 SE
2005
Dominio absoluto de Windows XP
Windows XP SP2/SP3
Conclusión
Montar varias máquinas virtuales siguiendo esta evolución permite recrear de forma bastante fiel la historia del PC doméstico y del PC de juegos. Cada época tiene una personalidad muy marcada:
1980–1985: primeros PCs y software muy básico
1990–1995: gran crecimiento del DOS, sonido y multimedia
2000–2005: consolidación total del 3D y de Windows
PCem es un emulador de ordenadores PC antiguos. Su objetivo es reproducir el comportamiento de hardware real de distintas épocas. Esto permite instalar sistemas operativos antiguos y ejecutar software que, en máquinas modernas, podría no funcionar correctamente.
PCem puede emular diferentes familias de equipos, desde sistemas 8086/286 hasta máquinas Pentium, Pentium II o configuraciones más avanzadas según la versión y ROM disponibles. La lista de máquinas compatibles depende de los ficheros ROM colocados en la carpeta adecuada. La documentación pública de PCem muestra que cada modelo necesita uno o varios archivos ROM concretos dentro de subcarpetas específicas de roms.
7. Diferencia entre PCem y VirtualBox
Característica
PCem
VirtualBox / VMware / Proxmox
Enfoque principal
Emulación de PCs antiguos
Virtualización de sistemas modernos
Hardware
Emula placas, BIOS, tarjetas y CPUs antiguas
Usa hardware virtual moderno
Rendimiento
Más lento, pero más fiel al hardware antiguo
Más rápido
Uso típico
MS-DOS, Windows 3.11, Windows 95, Windows 98, juegos antiguos
Linux, Windows moderno, servidores
BIOS
Depende de ROMs específicas
BIOS/UEFI integrada en el hipervisor
Aprendizaje histórico
Muy alto
Medio
Compatibilidad con juegos antiguos
Muy buena si se configura bien
Variable
Parte 1: instalación de PCem
1. Instalación en Windows
Paso 1. Descargar PCem
El alumno debe descargar PCem desde una fuente fiable. Según la versión usada, puede venir como programa ya compilado o como código fuente.
Si PCem no encuentra ninguna BIOS válida, puede abrirse sin máquinas disponibles o mostrar errores relacionados con ROMs ausentes.
Esto es normal: antes de crear la máquina hay que colocar las BIOS en la carpeta correcta.
Parte 2: preparación de BIOS y ROMs
1. ¿Qué es la BIOS?
La BIOS es el firmware básico de un PC clásico. Se ejecuta al encender el equipo y realiza tareas como:
Inicializar la placa base.
Comprobar la memoria RAM.
Detectar unidades de disco.
Inicializar teclado y pantalla.
Permitir entrar en la configuración del sistema.
Buscar un dispositivo de arranque.
Cargar el sistema operativo.
En ordenadores antiguos, la BIOS era mucho más visible para el usuario. Configurar mal el disco duro, el orden de arranque o la disquetera podía impedir que el sistema arrancase.
PCem no se limita a simular “un PC genérico”. Emula modelos concretos de placa o chipsets. Muchas de esas máquinas necesitan su BIOS original o una BIOS compatible.
Por ejemplo, la documentación pública del proyecto muestra modelos que requieren rutas y nombres concretos de ROM, como máquinas IBM AT, Compaq, placas Socket 7 o placas Slot 1.
La estructura exacta depende de la máquina seleccionada. PCem suele esperar nombres concretos. Si el nombre del archivo no coincide, la máquina puede no aparecer o puede fallar al arrancar.
4. Comprobación de BIOS detectadas
Una vez copiadas las ROMs:
Abrir PCem.
Crear una nueva máquina.
Abrir la lista de modelos disponibles.
Comprobar si aparecen nuevas placas o equipos.
Si no aparece la máquina deseada, revisar:
Nombre exacto del archivo.
Carpeta correcta.
Mayúsculas y minúsculas.
Si falta alguna ROM adicional.
Si la ROM está comprimida dentro de un .zip.
Si PCem está buscando las ROMs en otra carpeta.
Parte 3: creación de una máquina virtual de ejemplo
Máquina propuesta
Vamos a crear una máquina tipo PC 486 con MS-DOS / FreeDOS.
Esta opción es ideal para una primera práctica porque:
Es más sencilla que Windows 95/98.
Permite entender bien la BIOS.
Obliga a trabajar con disquetes, particiones y formateo.
Consume pocos recursos.
Es perfecta para explicar hardware clásico.
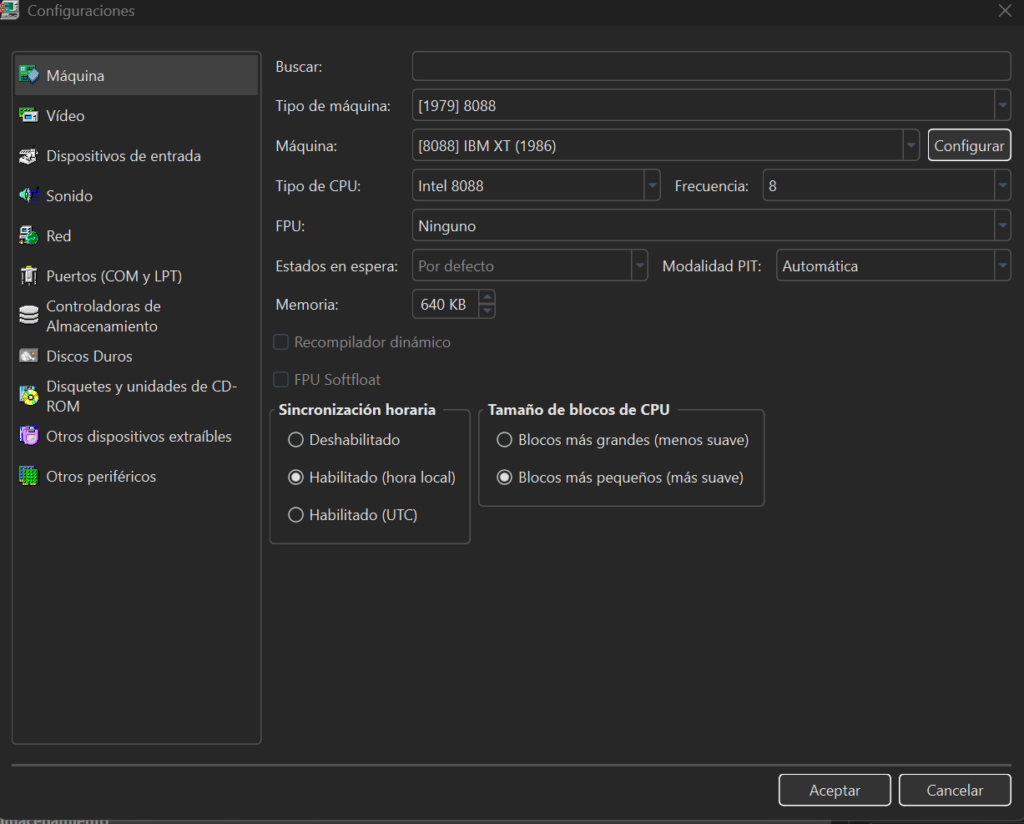
1. Configuración objetivo
Elemento
Configuración propuesta
Tipo de máquina
486 compatible
CPU
Intel 486DX2 a 66 MHz
RAM
16 MB
Tarjeta gráfica
VGA o SVGA compatible
Sonido
Sound Blaster 16
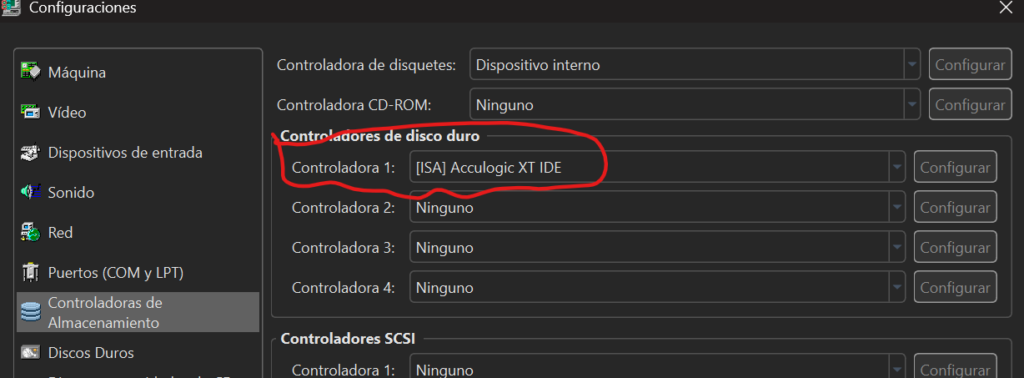
Disco duro
IDE de 512 MB
Disquetera
3.5” 1.44 MB
CD-ROM
Opcional
Sistema operativo
FreeDOS o MS-DOS
Ratón
Serial o PS/2, según disponibilidad
Red
No necesaria en esta primera práctica
Parte 4: crear la configuración en PCem
Paso 1. Abrir PCem
Abrir el programa PCem.
Seleccionar:
New machine
o la opción equivalente para crear una nueva configuración.
Paso 2. Asignar nombre a la máquina
Nombre recomendado:
PC_486_DOS_Practica
El alumno debe usar un nombre claro. Por ejemplo:
NombreAlumno_PC486_DOS
Paso 3. Seleccionar la placa base
Seleccionar una placa compatible con 486.
Ejemplos posibles, dependiendo de las ROM disponibles:
AMI 486 Award 486 Socket 3 compatible
Nota para el profesor: El nombre exacto dependerá de las ROM instaladas. Si se quiere evitar confusión, conviene preparar previamente un paquete de trabajo con una máquina concreta ya verificada en el aula.
Paso 4. Seleccionar CPU
Elegir:
Intel 486DX2/66
Si no aparece exactamente esa CPU, elegir una parecida:
486DX/33 486DX2/50 486DX2/66
Paso 5. Configurar memoria RAM
Asignar:
16 MB
Para MS-DOS es más que suficiente.
No conviene asignar cantidades absurdamente altas, porque una parte del objetivo es comprender las limitaciones reales de la época.
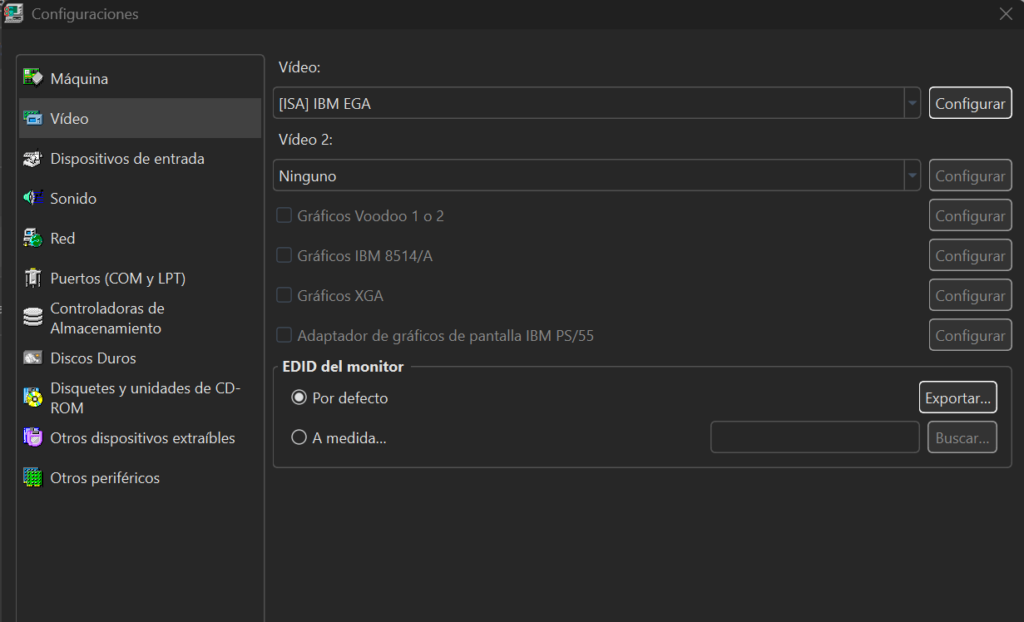
Paso 6. Configurar vídeo
Seleccionar una tarjeta gráfica compatible.
Opciones recomendadas:
VGA SVGA S3 Trio Cirrus Logic
Para una primera práctica con DOS, una VGA sencilla es suficiente.
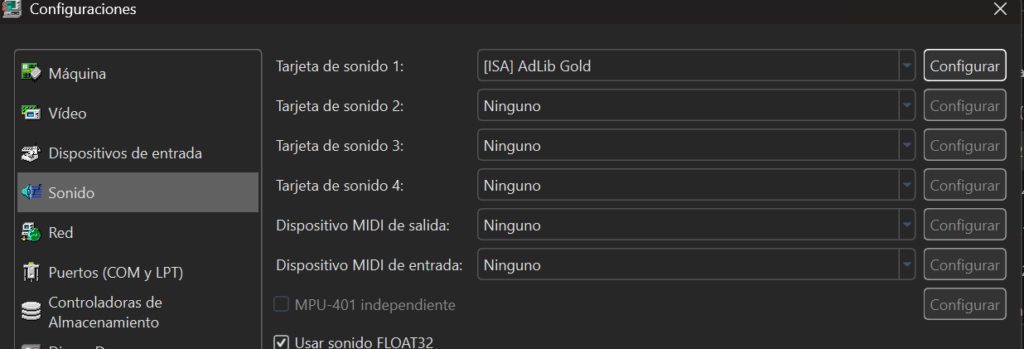
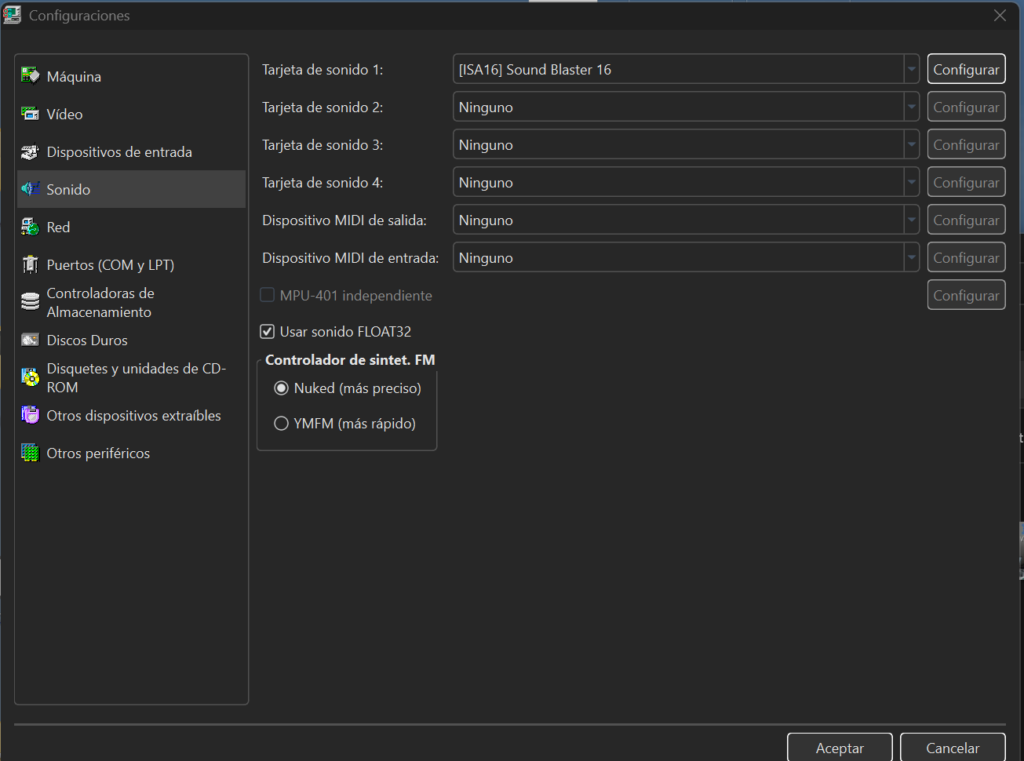
Paso 7. Configurar sonido
Seleccionar:
Sound Blaster 16
Configuración típica:
Parámetro
Valor habitual
Dirección I/O
220
IRQ
5 o 7
DMA
1
High DMA
5
Esta parte será útil más adelante si se instalan juegos o programas multimedia.
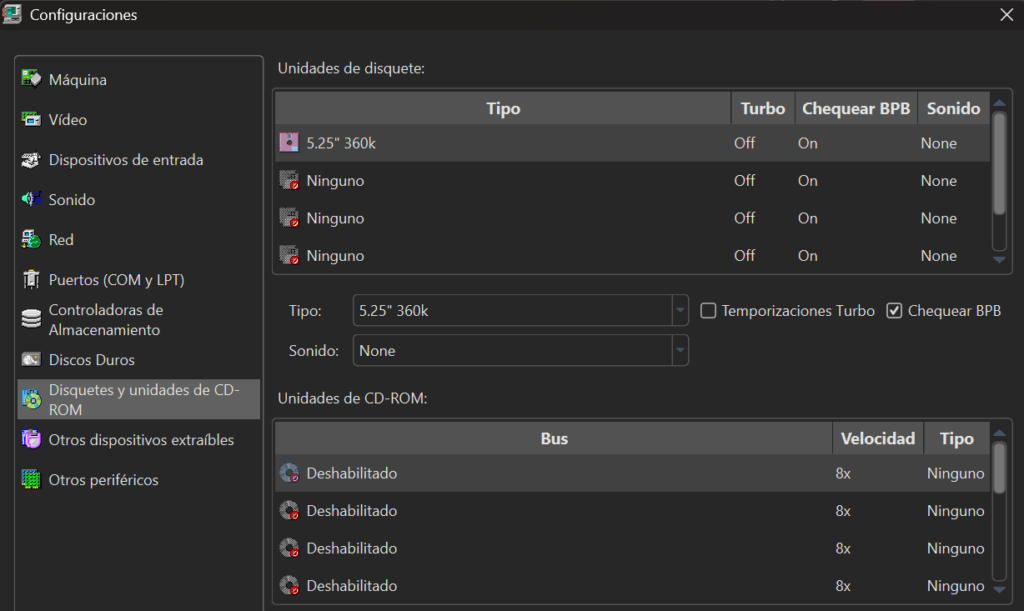
Paso 8. Configurar disquetera
Añadir una disquetera:
3.5" 1.44 MB
Será necesaria para arrancar con un disquete de instalación o de arranque.
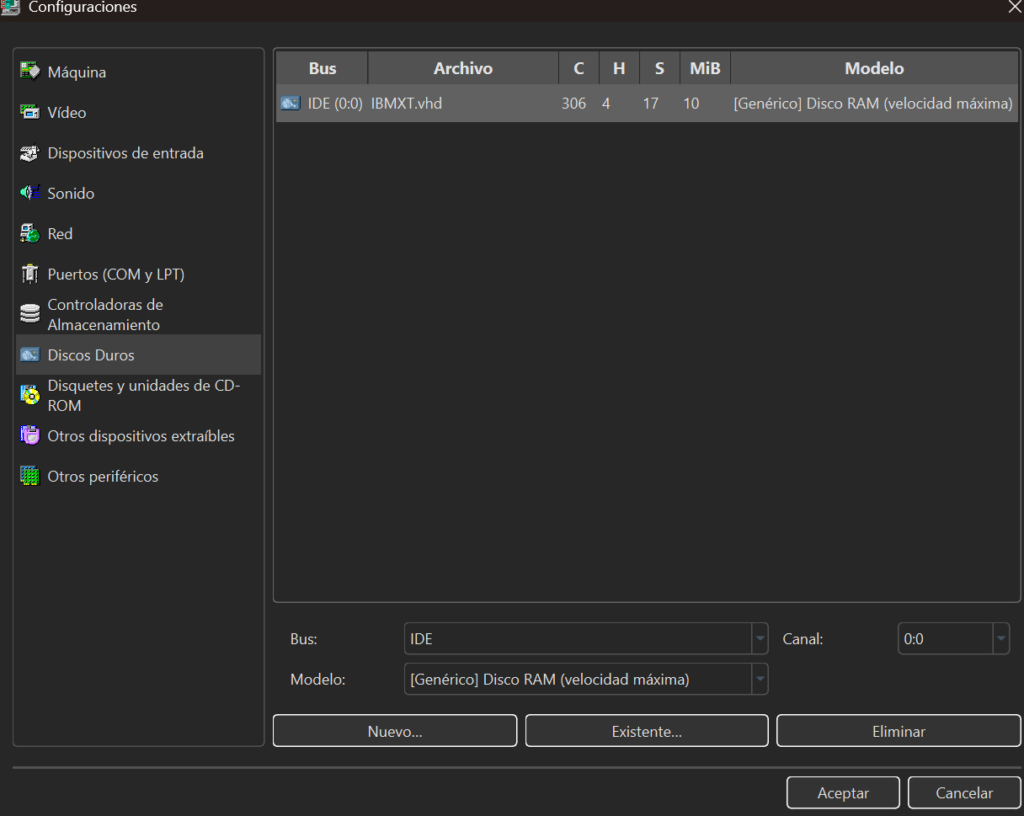
Paso 9. Crear disco duro virtual
Crear un disco duro nuevo.
Tamaño recomendado:
512 MB
Nombre del archivo:
discos/pc486_dos_512mb.img
Tipo:
IDE
En PCs antiguos, el disco duro se identificaba mediante geometría CHS:
Cylinders
Heads
Sectors
Muchas BIOS antiguas permiten autodetección, pero otras exigen introducir manualmente los datos.
Parte 5: primera arrancada y entrada en BIOS
Paso 1. Iniciar la máquina
Arrancar la máquina creada.
Es posible que aparezca un mensaje similar a:
No boot device Disk boot failure Insert system disk CMOS checksum error Press F1 to continue Press DEL to enter Setup
Esto es normal. Todavía no hemos configurado la BIOS ni instalado ningún sistema operativo.
Paso 2. Entrar en la BIOS
Durante el arranque, pulsar la tecla correspondiente.
Las teclas más habituales son:
Tecla
Uso habitual
DEL / Supr
Entrar en BIOS Award/AMI
F1
Continuar o entrar en configuración
F2
Setup en algunas BIOS
ESC
Menú o salida
F10
Guardar y salir
En muchas BIOS antiguas, la tecla más habitual es:
Supr / DEL
Paso 3. Configurar fecha y hora
Dentro de la BIOS:
Ir a la pantalla principal.
Configurar fecha.
Configurar hora.
Ejemplo:
Date: 05/04/1995 Time: 12:00:00
Se puede usar una fecha histórica para contextualizar la práctica.
Copiar un driver de ratón compatible, por ejemplo:
MOUSE.COM
Guardar en:
C:\DRIVERS\MOUSE
Modificar AUTOEXEC.BAT:
C:\DRIVERS\MOUSE\MOUSE.COM
2. Driver de CD-ROM
Para usar CD-ROM en DOS se necesitan normalmente dos elementos:
Un controlador en CONFIG.SYS.
El programa MSCDEX.EXE en AUTOEXEC.BAT.
Ejemplo de CONFIG.SYS:
DEVICE=C:\DRIVERS\CDROM\OAKCDROM.SYS /D:MSCD001
Ejemplo de AUTOEXEC.BAT:
C:\DOS\MSCDEX.EXE /D:MSCD001 /L:D
Después de reiniciar, el CD-ROM debería aparecer como:
D:
3. Configuración de Sound Blaster
Añadir al AUTOEXEC.BAT:
SET BLASTER=A220 I5 D1 H5 T6 SET SOUND=C:\SB16
Explicación:
Parámetro
Significado
A220
Dirección base 220h
I5
IRQ 5
D1
DMA 1
H5
DMA alta 5
T6
Tipo Sound Blaster 16
Parte 9: ejemplo de máquina virtual alternativa con Windows 95
Una vez terminada la práctica con DOS, se puede hacer una segunda máquina más avanzada.
Configuración recomendada
Elemento
Configuración
Máquina
Socket 7 / Pentium
CPU
Pentium 133 MHz
RAM
32 MB o 64 MB
Disco duro
2 GB
Gráfica
S3 Trio64 / S3 ViRGE
Sonido
Sound Blaster 16
CD-ROM
IDE
Sistema operativo
Windows 95 OSR2
Disquetera
3.5” 1.44 MB
PCem incluye o ha incluido soporte para muchas máquinas de los años 90, incluyendo placas Socket 7 y Slot 1, dependiendo de la versión y de las ROM instaladas. Por ejemplo, la documentación pública lista configuraciones como FIC VA-503+ o Gigabyte GA-686BX con CPUs Pentium, AMD K6 o Pentium II, siempre que estén disponibles las ROM correspondientes.
Pasos resumidos para Windows 95
Crear máquina Pentium.
Asignar 32 o 64 MB de RAM.
Crear disco duro de 2 GB.
Activar CD-ROM.
Montar disquete de arranque de Windows 95/98 con soporte CD-ROM.
Arrancar desde disquete.
Ejecutar fdisk.
Crear partición primaria.
Reiniciar.
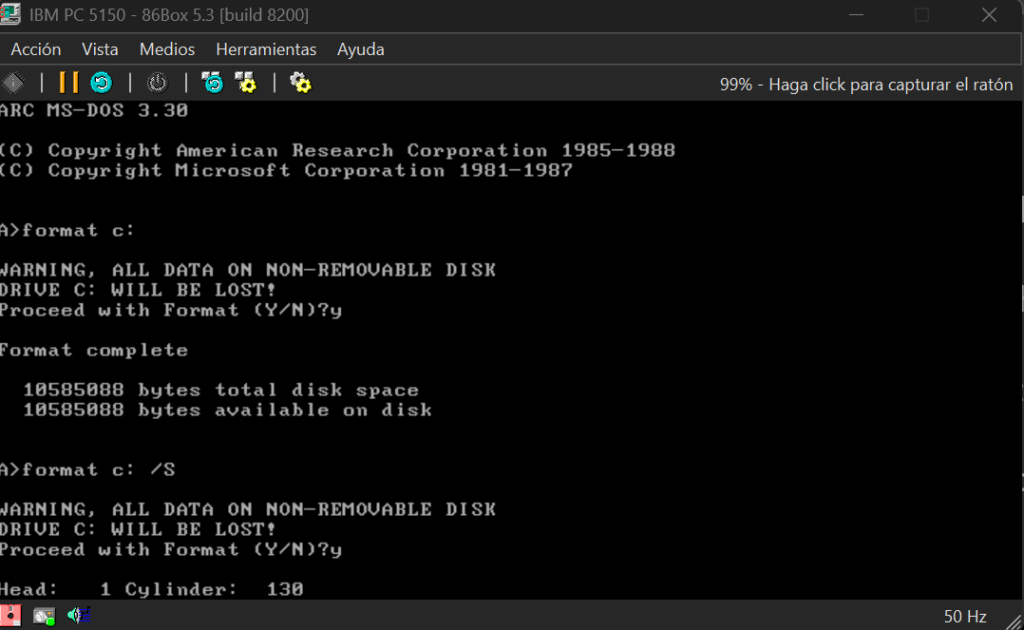
Formatear:
format c: /s
Entrar en la unidad de CD-ROM:
D:
Ejecutar:
setup
Seguir el instalador de Windows 95.
Instalar drivers de vídeo y sonido si es necesario.
Documentar problemas encontrados.
Problemas frecuentes y soluciones
Problema 1: la máquina no aparece en PCem
Causa probable: faltan ROMs o están mal colocadas.
Solución:
Revisar carpeta roms.
Revisar nombres exactos.
Revisar mayúsculas/minúsculas.
Comprobar si la ROM debe ir dentro de una subcarpeta concreta.
Problema 2: aparece “CMOS checksum error”
Causa: la BIOS no tiene configuración guardada todavía.
Solución:
Entrar en BIOS.
Configurar fecha, hora, disco y disquetera.
Guardar cambios.
Reiniciar.
Problema 3: no arranca desde disquete
Causa: orden de arranque incorrecto o imagen mal montada.
Solución:
Configurar Boot Sequence como A, C.
Comprobar que la imagen de disquete está montada.
Comprobar que la imagen es arrancable.
Problema 4: no detecta el disco duro
Causa: disco no creado, no conectado o no detectado en BIOS.
Solución:
Revisar configuración IDE.
Entrar en BIOS.
Usar IDE HDD Auto Detection.
Guardar cambios.
Problema 5: después de FDISK sigue sin arrancar
Causa: falta formatear con archivos de sistema o partición no activa.
Solución:
Ejecutar:
fdisk
Comprobar que la partición primaria está activa.
Después:
format c: /s
Problema 6: el CD-ROM no aparece en DOS
Causa: faltan drivers de CD-ROM.
Solución:
Revisar CONFIG.SYS:
DEVICE=C:\DRIVERS\CDROM\OAKCDROM.SYS /D:MSCD001
Revisar AUTOEXEC.BAT:
C:\DOS\MSCDEX.EXE /D:MSCD001 /L:D
Problema 7: el sonido no funciona
Causa: configuración incorrecta de Sound Blaster.
Solución:
Comprobar que los valores de PCem coinciden con la variable BLASTER:
n esta práctica vamos a trabajar con 86Box, un emulador de ordenadores compatibles x86 pensado para recrear equipos antiguos con bastante fidelidad. A diferencia de VirtualBox, VMware o Proxmox, que están orientados principalmente a virtualizar sistemas modernos, 86Box intenta reproducir el comportamiento de hardware real de distintas épocas: placas base, BIOS, procesadores 286, 386, 486, Pentium, tarjetas gráficas, tarjetas de sonido, controladoras IDE, disqueteras, CD-ROM y otros componentes clásicos.
Este proyecto tiene como objetivo que el alumno no solo “instale un sistema operativo antiguo”, sino que entienda cómo arrancaba y se configuraba un PC clásico: qué papel tenía la BIOS, cómo se detectaban los discos, cómo se configuraba el orden de arranque y por qué era necesario cargar controladores manualmente.
86Box necesita un conjunto de ROMs para emular correctamente muchos equipos. Estas ROMs incluyen BIOS de sistema y ROMs opcionales de tarjetas de expansión, organizadas en carpetas según el tipo de dispositivo o modelo emulado. La propia documentación de 86Box indica que, sin un conjunto de ROMs válido, el programa no podrá iniciar correctamente determinadas máquinas.
¿Qué es 86Box?
86Box es un emulador de ordenadores compatibles x86. Su finalidad es reproducir el comportamiento de PCs antiguos de forma más fiel que una máquina virtual moderna.
Con 86Box podemos emular equipos de distintas generaciones:
8086 / 8088.
Pentium.
Pentium MMX.
Pentium II.
Otros sistemas compatibles, según la versión y las ROMs disponibles.
La versión estable más reciente publicada en la página oficial de 86Box es la v5.3, lanzada el 21 de diciembre de 2025. Esta versión incluye mejoras de rendimiento, correcciones y nuevo hardware soportado.
Diferencia entre 86Box y PCem
86Box nació como una continuación o evolución del trabajo realizado alrededor de PCem, pero actualmente se mantiene como un proyecto propio y con desarrollo activo.
Característica
PCem
86Box
Tipo de programa
Emulador de PCs antiguos
Emulador de PCs antiguos
Estado actual
Proyecto histórico muy usado
Proyecto activo y actualizado
Uso principal
Emular hardware retro
Emular hardware retro con más hardware soportado
BIOS/ROMs
Necesita ROMs específicas
Necesita ROMs específicas
Configuración
Manual, algo más clásica
Incluye gestor de máquinas virtuales en versiones recientes
Ideal para
DOS, Windows 3.x, Windows 95/98
DOS, Windows 3.x, Windows 95/98 y más configuraciones
Dificultad
Media
Media
86Box incluye actualmente un gestor de máquinas virtuales que permite crear, administrar, arrancar y controlar varias configuraciones desde una misma interfaz. La documentación oficial indica que, al abrir 86Box, se inicia este gestor de máquinas virtuales, aunque sigue considerándose una función en evolución.
Material necesario
Para realizar la práctica necesitaremos:
86Box instalado.
Conjunto de ROMs/BIOS compatible con 86Box.
Imagen de instalación de un sistema operativo retro.
Imagen de disquete de arranque, si es necesaria.
Drivers de CD-ROM, ratón, sonido o vídeo, según el sistema elegido.
Espacio en disco para crear discos duros virtuales.
Capturador de pantalla para documentar el proceso.
Las BIOS y ROMs son ficheros que pertenecen al firmware de equipos y tarjetas reales. En muchos casos pueden estar protegidas por derechos de autor.
Para una práctica educativa, lo correcto es:
Usar ROMs obtenidas de forma legítima.
No redistribuir BIOS propietarias sin permiso.
Documentar qué ROMs se han usado.
No mezclar ROMs aleatorias sin saber para qué máquina sirven.
86Box dispone de documentación específica sobre el conjunto de ROMs y explica que estas ROMs incluyen BIOS de sistema y ROMs de tarjetas de expansión. También indica que el conjunto de ROMs se organiza por directorios según el tipo de dispositivo o modelo.
Instalación de 86Box
1. Descarga del programa
El primer paso es descargar 86Box desde su página oficial o desde su repositorio de GitHub.
Conviene usar una versión estable, especialmente en clase. Las versiones experimentales pueden incluir funciones nuevas, pero también más errores.
2. Organización de carpetas
Antes de empezar, crearemos una carpeta de trabajo.
Ejemplo en Windows:
C:\Emuladores\86Box
Dentro de esa carpeta podemos organizar el material así:
Ahí es donde colocaremos el conjunto de BIOS y ROMs que usará el emulador.
7. Carga de BIOS y ROMs en 86Box
1. ¿Para qué sirven las ROMs?
86Box necesita ROMs para poder emular determinados equipos y tarjetas. Estas ROMs pueden incluir:
BIOS de la placa base.
BIOS de tarjetas gráficas.
ROMs de controladoras.
ROMs de tarjetas de red.
ROMs de tarjetas de sonido.
Otros firmwares necesarios para hardware concreto.
Sin estas ROMs, algunas máquinas no aparecerán como disponibles o no arrancarán correctamente.
2. Carpeta de ROMs
La documentación de 86Box explica que el conjunto de ROMs debe extraerse en una ubicación soportada por el emulador. En algunos sistemas se puede colocar la carpeta roms junto al ejecutable. También existen diferencias según versión y sistema operativo, por lo que conviene comprobar la ruta concreta en la documentación o en la propia interfaz del programa.
No debemos dejar las ROMs comprimidas si la documentación indica que deben estar extraídas.
Comprobación de ROMs
Una vez colocadas las ROMs:
Abrimos 86Box.
Entramos en el gestor de máquinas.
Creamos una nueva máquina.
Revisamos la lista de placas base disponibles.
Comprobamos que aparecen modelos de máquinas.
Si no aparece ninguna máquina o aparece un error de ROMs, debemos revisar:
Si la carpeta se llama exactamente roms.
Si está en la ruta correcta.
Si las ROMs están extraídas y no dentro de un .zip.
Si se ha descargado un conjunto de ROMs compatible con la versión usada.
Si se está usando una versión experimental de 86Box que requiere ROMs más recientes.
Primer arranque de 86Box
Al abrir 86Box veremos el gestor de máquinas virtuales.
Desde ahí podremos:
Crear una máquina nueva.
Editar una máquina existente.
Arrancar una máquina.
Eliminar una configuración.
Duplicar configuraciones.
Gestionar discos e imágenes.
En versiones actuales, 86Box abre directamente este gestor de máquinas, que sirve para administrar varias configuraciones emuladas.
Máquina de ejemplo para la práctica
Para esta práctica crearemos una máquina sencilla y estable:
Máquina propuesta
PC 486 con FreeDOS o MS-DOS
Esta máquina es ideal para empezar porque permite trabajar con:
BIOS.
Disquetera.
Disco duro IDE.
FDISK.
Formateo.
Arranque desde disco.
Archivos AUTOEXEC.BAT y CONFIG.SYS.
Configuración recomendada
Elemento
Configuración
Tipo de máquina
486 compatible
CPU
Intel 486DX2/66
RAM
16 MB
Tarjeta gráfica
VGA / SVGA
Tarjeta de sonido
Sound Blaster 16
Disco duro
IDE de 512 MB
Disquetera
3.5” 1.44 MB
CD-ROM
Opcional
Sistema operativo
FreeDOS o MS-DOS
Red
No necesaria
Creación de la máquina virtual en 86Box
Paso 1. Crear una nueva máquina
Abrimos 86Box y seleccionamos la opción para crear una nueva máquina.
Nombre recomendado:
PC_486_DOS_Alumno
También podemos usar un nombre más descriptivo:
NombreAlumno_86Box_486_DOS
Paso 2. Seleccionar la placa base
En el apartado de máquina o placa base seleccionaremos una placa compatible con 486.
El nombre exacto dependerá de las ROMs disponibles.
Ejemplos posibles:
AMI 486 Award 486 Socket 3 486 PCI 486 ISA/VLB/PCI
No todos los modelos aparecerán en todas las instalaciones. Si una placa no aparece, normalmente significa que faltan ROMs o que no están bien colocadas.
Paso 3. Seleccionar el procesador
Elegimos una CPU de la familia 486.
Configuración recomendada:
Intel 486DX2/66
Si no aparece exactamente esa opción, podemos usar otra parecida:
No conviene asignar demasiada RAM porque perderíamos parte del sentido histórico de la práctica. Un PC 486 real normalmente trabajaba con cantidades mucho más modestas que un equipo actual.
Paso 5. Configurar la tarjeta gráfica
Elegimos una tarjeta sencilla y compatible.
Opciones habituales:
VGA SVGA Cirrus Logic S3 Trio Tseng ET4000
Para DOS, una tarjeta VGA o SVGA básica es suficiente.
Paso 6. Configurar la tarjeta de sonido
Seleccionamos una tarjeta compatible con muchos juegos y programas de la época.
Recomendación:
Sound Blaster 16
Valores típicos:
Parámetro
Valor
Dirección I/O
220
IRQ
5 o 7
DMA
1
High DMA
5
Más adelante estos valores se usarán en la variable BLASTER.
Paso 7. Configurar la disquetera
Añadimos una disquetera:
3.5" 1.44 MB
Esta unidad será la unidad A: dentro de DOS.
Paso 8. Crear el disco duro virtual
Creamos un disco duro nuevo.
Tamaño recomendado:
512 MB
Nombre del archivo:
discos/pc486_dos_512mb.img
Tipo de conexión:
IDE
Este disco aparecerá como disco principal de la máquina.
Paso 9. Configurar CD-ROM
Este paso es opcional para la primera práctica, pero recomendable si queremos instalar software desde ISO.
Configuración:
CD-ROM IDE
En DOS, para que el CD-ROM funcione, normalmente necesitaremos cargar un driver en CONFIG.SYS y MSCDEX.EXE en AUTOEXEC.BAT.
Primera arrancada de la máquina
Una vez creada la máquina, la arrancamos.
Es normal que aparezcan mensajes como:
CMOS checksum error No boot device Disk boot failure Insert system disk Press DEL to enter Setup
Esto no significa que la práctica esté mal. Significa que la máquina todavía no tiene BIOS configurada ni sistema operativo instalado.
Entrada en BIOS
Paso 1. Pulsar la tecla de acceso
Durante el arranque, pulsamos la tecla correspondiente para entrar en la BIOS.
Las más habituales son:
Tecla
Uso
DEL / Supr
BIOS AMI o Award
F1
Continuar o entrar en configuración
F2
Setup en algunas BIOS
ESC
Menú o salida
F10
Guardar y salir
En muchas máquinas antiguas lo normal será:
Supr / DEL
Paso 2. Configurar fecha y hora
Dentro de la BIOS, buscamos la pantalla principal.
Ejemplo:
Date: 05/04/1995 Time: 12:00:00
Podemos usar una fecha histórica para que la práctica tenga más contexto.
Paso 3. Configurar la disquetera
En el apartado de configuración básica o Standard CMOS Setup, configuramos:
Para clase recomiendo usar FreeDOS, porque es libre y evita problemas de licencias. Si se dispone de una licencia legítima de MS-DOS, también se puede usar.
Paso 1. Montar el disquete o ISO de instalación
Desde el menú de 86Box montamos la imagen correspondiente.
Ejemplo con disquete:
freedos_boot.img
Ejemplo con CD-ROM:
freedos.iso
Paso 2. Arrancar desde el medio de instalación
Arrancamos la máquina.
Si todo está bien configurado, debería aparecer un instalador o un prompt parecido a:
A:\>
Paso 3. Crear partición con FDISK
Ejecutamos:
fdisk
Seleccionamos las opciones:
Create DOS partition Create Primary DOS Partition Use maximum available size Set partition active
Después reiniciamos la máquina.
Paso 4. Formatear el disco duro
Volvemos a arrancar desde el disquete o medio de instalación.
Ejecutamos:
format c: /s
El parámetro /s copia los archivos básicos del sistema para que el disco duro pueda arrancar.
Paso 5. Arrancar desde el disco duro
Apagamos la máquina.
Quitamos el disquete o ISO de arranque.
Arrancamos de nuevo.
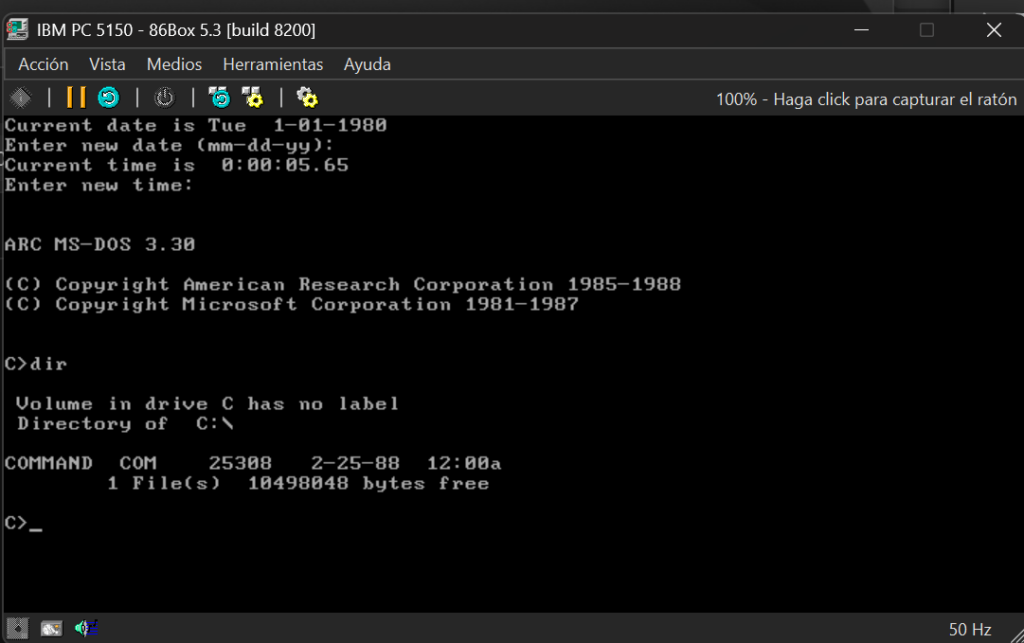
Si todo está correcto, veremos:
C:\>
La máquina ya arranca desde su propio disco duro virtual.
En esta práctica el alumnado diseñará e implantará un pequeño laboratorio informático capaz de recrear distintas generaciones de ordenadores personales, desde equipos antiguos basados en MS-DOS y Windows 3.x / 95 / 98, hasta sistemas más modernos como Windows XP y Windows 7.
Para ello se utilizarán dos tipos de herramientas:
Emulación, para recrear equipos antiguos con un hardware similar al de su época.
Virtualización, para instalar sistemas más recientes de forma rápida y controlada.
El objetivo no es únicamente “ver sistemas antiguos”, sino analizar la evolución del hardware y del software, comprender las diferencias entre emular y virtualizar, y documentar técnicamente todo el proceso.
Contexto de la práctica
Una pequeña aula de tecnología quiere montar un laboratorio didáctico para mostrar a futuros estudiantes cómo ha evolucionado el PC a lo largo de varias décadas.
El laboratorio debe permitir:
recrear distintas épocas de la informática personal,
instalar sistemas operativos representativos,
probar software y utilidades de cada momento,
comparar tecnologías,
documentar problemas de compatibilidad y configuración.
El equipo técnico encargado de este trabajo sois vosotros.
Objetivos
Al finalizar esta práctica, el alumno deberá ser capaz de:
comprender la evolución del hardware del PC entre diferentes generaciones,
diferenciar entre emulación y virtualización,
instalar y configurar sistemas operativos antiguos y modernos en entornos virtuales,
seleccionar una configuración coherente para cada época,
documentar incidencias técnicas,
realizar pruebas de funcionamiento,
elaborar una memoria técnica del laboratorio montado.
Resultados de aprendizaje que se trabajan
Con esta práctica se trabajan, entre otros, aspectos relacionados con:
implantación de sistemas operativos,
administración básica de sistemas,
virtualización,
análisis de hardware,
documentación técnica,
resolución de incidencias,
planificación y validación de entornos informáticos.
Materiales y herramientas necesarias
Cada grupo o alumno deberá disponer de lo siguiente:
un ordenador anfitrión con recursos suficientes,
software de emulación: PCem o 86Box,
software de virtualización: VirtualBox,
imágenes ISO o disquetes de instalación de los sistemas operativos a utilizar,
utilidades o programas representativos de cada época,
carpeta de trabajo para guardar capturas, configuraciones y documentación.
Sistemas y generaciones propuestas
Se recomienda recrear al menos cuatro generaciones diferentes. Como referencia, se propone esta selección:
Generación
Tipo de entorno
Sistema propuesto
1990
Emulación
MS-DOS 5.0 + Windows 3.0 o 3.1
1995
Emulación
Windows 95
2000
Emulación
Windows 98 SE
2005
Virtualización
Windows XP
2010
Virtualización
Windows 7
El profesor podrá ajustar esta lista según el material disponible.
Desarrollo de la práctica
Paso 1. Crear la estructura del proyecto
Antes de empezar, cada alumno o grupo deberá crear una carpeta principal para organizar todo el trabajo.
Cuando hoy hablamos de un “PC”, normalmente pensamos en un ordenador con Windows, Linux, conexión a Internet, discos SSD, varios gigabytes de memoria RAM y una potencia que hace unas décadas habría sido impensable. Sin embargo, el concepto de PC compatible tiene un origen mucho más humilde y, al mismo tiempo, enormemente importante: el IBM PC 5150 y su evolución, el IBM PC XT.
En esta práctica vamos a viajar al comienzo de la informática personal moderna. No se trata únicamente de “probar un ordenador antiguo”, sino de entender cómo funcionaban los primeros PCs, cómo arrancaban, cómo se gestionaban los discos, qué papel tenía la BIOS y cómo se trabajaba con sistemas operativos como PC DOS o MS-DOS.
Este tipo de práctica es especialmente interesante porque nos permite ver, de forma muy clara, la base sobre la que se construyó gran parte de la informática actual.
¿Qué fue el IBM PC 5150?
El IBM PC 5150 fue presentado por IBM en 1981 y se convirtió en uno de los ordenadores más influyentes de la historia. Aunque no fue el primer ordenador personal, sí fue el que ayudó a establecer el estándar de lo que durante años se conocería como PC compatible.
Su arquitectura era relativamente abierta en comparación con otros sistemas de la época. Esto permitió que otras empresas fabricaran componentes, tarjetas de expansión, periféricos y, con el tiempo, ordenadores compatibles con el diseño original de IBM.
Esta decisión tuvo una consecuencia enorme: el ecosistema del PC creció rápidamente y terminó convirtiéndose en el modelo dominante en oficinas, centros educativos, empresas y hogares.
¿Por qué emular un IBM PC o un IBM PC XT?
A primera vista, emular un ordenador de los años 80 puede parecer solo una actividad nostálgica. Pero en realidad es una práctica muy potente desde el punto de vista educativo.
Con una máquina moderna, muchos procesos quedan ocultos. El sistema operativo arranca automáticamente, los discos se detectan solos, los controladores se instalan en segundo plano y el usuario apenas ve qué ocurre por debajo.
En cambio, al trabajar con un IBM PC o un PC XT, todo es mucho más visible:
la BIOS tiene un papel fundamental;
el arranque se entiende paso a paso;
el sistema operativo se carga desde disquete o disco duro;
las unidades tienen letras como A:, B: y C:;
los comandos se escriben manualmente;
los recursos del sistema son muy limitados;
cada componente de hardware debe estar bien configurado.
Esta sencillez aparente nos ayuda a comprender conceptos que siguen siendo importantes hoy en día.
Configuración 86Box
Arranque sin sistema operativo (BASIC)
Instalar MS-DOS 3.3
Con la máquina apagada o desde el menú de 86Box:
Ve a Media.
Entra en Floppy 1.
Selecciona Existing image.
Carga una imagen .img o .ima de MS-DOS. (Es importante que el medio coincida, en este caso discos de 5 1/4 de 360)
🎧 Audio del tema Escucha este breve audio para repasar las ideas principales este proyecto.
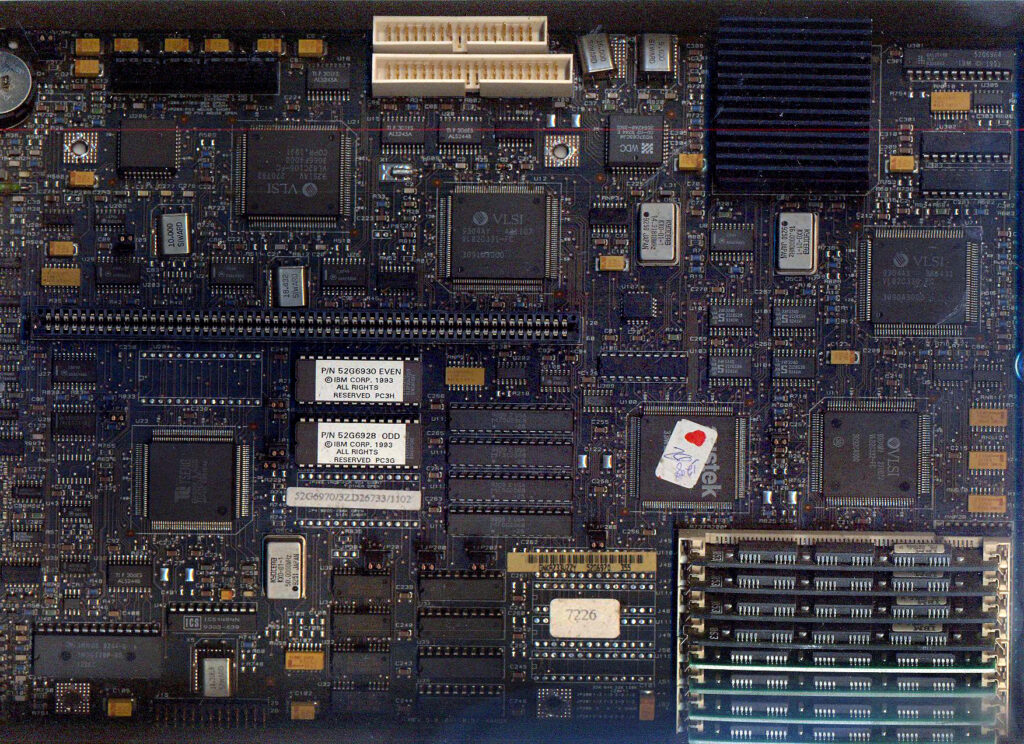
Dentro del proyecto de PC retro vamos a trabajar con una máquina muy interesante: el IBM PS/ValuePoint. No es tan mítico como un IBM PC XT, ni tan recordado como los PS/2, pero representa un momento muy importante de la historia del PC: el momento en el que IBM tuvo que aceptar que el mercado ya no giraba solo alrededor de sus estándares propietarios.
El IBM PS/ValuePoint fue una familia de ordenadores lanzada a comienzos de los años 90. Su objetivo era claro: ofrecer equipos IBM más competitivos, más parecidos a los PC compatibles del mercado y menos cerrados que la gama PS/2. La línea PS/ValuePoint apareció alrededor de 1992 y estuvo activa hasta mediados de los años 90, antes de ser sustituida por otras familias como IBM PC Series.
Para nuestro proyecto retro es una máquina ideal porque nos coloca justo en la época dorada del 486, de MS-DOS, de Windows 3.1, de los primeros entornos multimedia y de juegos como Doom, Monkey Island 2, Alone in the Dark, SimCity 2000, Wolfenstein 3D o Indiana Jones and the Fate of Atlantis.
¿Qué era el IBM PS/ValuePoint?
El IBM PS/ValuePoint fue una gama de ordenadores personales de IBM orientada a empresas, educación y usuarios que querían un PC fiable sin pagar el precio ni asumir las limitaciones de algunas decisiones propietarias de IBM.
Venía de una época complicada para IBM. La empresa había creado el estándar PC original, pero después intentó recuperar control con la gama PS/2, que utilizaba tecnologías como el bus Micro Channel Architecture, más cerrado y menos compatible con las tarjetas habituales del mercado. El problema es que el mundo del PC compatible ya iba por libre: placas base clónicas, tarjetas ISA, discos IDE, tarjetas VGA/SVGA y componentes más económicos.
El PS/ValuePoint fue una respuesta a esa situación. Era un IBM, sí, pero mucho más cercano al PC estándar que podía montar cualquier fabricante. En lugar de apostar por un ecosistema cerrado, estos equipos usaban componentes más comunes en el mercado, como buses ISA/VLB/PCI según modelo, discos IDE y tarjetas de expansión más convencionales.
Dicho de forma sencilla: el PS/ValuePoint fue IBM bajando a la tierra del PC compatible.
Modelos y formatos
La familia PS/ValuePoint tuvo varios formatos físicos. Entre los más representativos estaban:
Formato
Ejemplo de tipo
Descripción
Space saving desktop
6382 /S
Caja horizontal compacta, menos ranuras y bahías
Desktop
6384 /D
Sobremesa horizontal más grande
Mini Tower
6387 /T
Torre pequeña, más ampliable
Algunos documentos de mantenimiento de IBM mencionan modelos como 425SX, 433SX, 433DX, 466DX2 y variantes en formato /S, /D y /T. Estos nombres suelen indicar el tipo de procesador: por ejemplo, un 466DX2 hace referencia a un 486DX2 a 66 MHz.
Para emulación en 86Box, una configuración muy interesante es un IBM PS/ValuePoint 433DX o 466DX2, porque representa muy bien un PC de mediados de los 90 sin irnos todavía a la era Pentium.
Especificaciones típicas
Las configuraciones variaban mucho según modelo, pero una máquina representativa podía tener algo parecido a esto:
Componente
Configuración típica
Procesador
Intel 486SX, 486DX, 486DX2 o incluso DX4 en algunos modelos
Frecuencia
25, 33, 50, 66 o 100 MHz según versión
Memoria RAM
4 MB, 8 MB, 16 MB o más
Disco duro
IDE, normalmente entre 120 MB y 500 MB en configuraciones habituales
Disquetera
3.5” de 1.44 MB
Vídeo
VGA/SVGA, a menudo integrado en placa
Sonido
No siempre incluido; se podía añadir Sound Blaster u otra ISA
Sistema operativo
PC DOS, MS-DOS, Windows 3.1, OS/2 o posteriormente Windows 95
Algunas referencias de IBM para modelos ValuePoint muestran configuraciones con procesadores 486SX-25, 486DX-33, 486DX2-50 y 486DX2-66, memoria de 4 u 8 MB, discos de 120 MB o 170 MB y PC DOS 5.02 con Windows 3.1 en ciertos modelos.
¿Por qué es interesante para un proyecto retro?
El IBM PS/ValuePoint es perfecto para un proyecto de PC retro por varias razones.
Primero, porque representa una época muy concreta: el salto desde los PC puramente de oficina hacia los PC multimedia. Es la etapa en la que todavía se trabaja mucho con MS-DOS, pero Windows empieza a ganar protagonismo.
Segundo, porque es una máquina suficientemente potente para ejecutar muchos juegos clásicos de DOS, pero no tan moderna como para perder la sensación retro. Un 486DX2 a 66 MHz sigue teniendo limitaciones, y eso es parte de la gracia.
Tercero, porque permite explicar conceptos históricos muy útiles:
Diferencias entre IBM PC, PS/2 y PS/ValuePoint.
Evolución de ISA, VLB y PCI.
Importancia del disco IDE.
Papel de MS-DOS y Windows 3.1.
Primeros pasos del PC multimedia.
Tarjetas de sonido compatibles Sound Blaster.
Configuración manual de memoria convencional, EMS y XMS.
Y cuarto, porque en 86Box podemos recrearlo sin necesidad de tener el hardware real.
Programas recomendados
Además de juegos, podemos instalar software de la época para darle más sentido al proyecto.
Programa
Uso
MS-DOS 6.22
Sistema base clásico
Windows 3.11
Entorno gráfico de la época
Norton Commander
Gestión de archivos
Microsoft Works
Ofimática ligera
WordPerfect
Procesador de textos clásico
Paintbrush
Dibujo básico en Windows
WinZip antiguo
Compresión de archivos
QBasic
Programación básica en DOS
Turbo Pascal
Programación clásica
Borland C++
Desarrollo en C/C++
Doom Setup
Configuración de sonido, teclado y vídeo
Configurar un IBM PS/ValuePoint en 86Box
En esta práctica vamos a crear una máquina virtual en 86Box que simule un IBM PS/ValuePoint basado en 486. Después prepararemos el disco duro, instalaremos MS-DOS, añadiremos soporte para CD-ROM, configuraremos una tarjeta de sonido y dejaremos el sistema listo para instalar juegos y programas clásicos.
Material necesario
Antes de empezar necesitamos:
Elemento
Uso
86Box instalado
Emulador de PC clásico
ROMs de 86Box
Necesarias para arrancar las máquinas
Imagen de disquete de MS-DOS 6.22
Instalación del sistema operativo
Imagen ISO o carpeta con juegos/programas
Software para instalar
Imagen de drivers de Sound Blaster
Para configurar sonido
Imagen o driver de CD-ROM
Por ejemplo OAKCDROM.SYS
Tiempo y paciencia
Muy necesario en informática retro
Importante: 86Box emula hardware de forma más realista que otros emuladores. Eso significa que a veces hay que configurar BIOS, discos, controladoras y drivers como se hacía en los años 90.
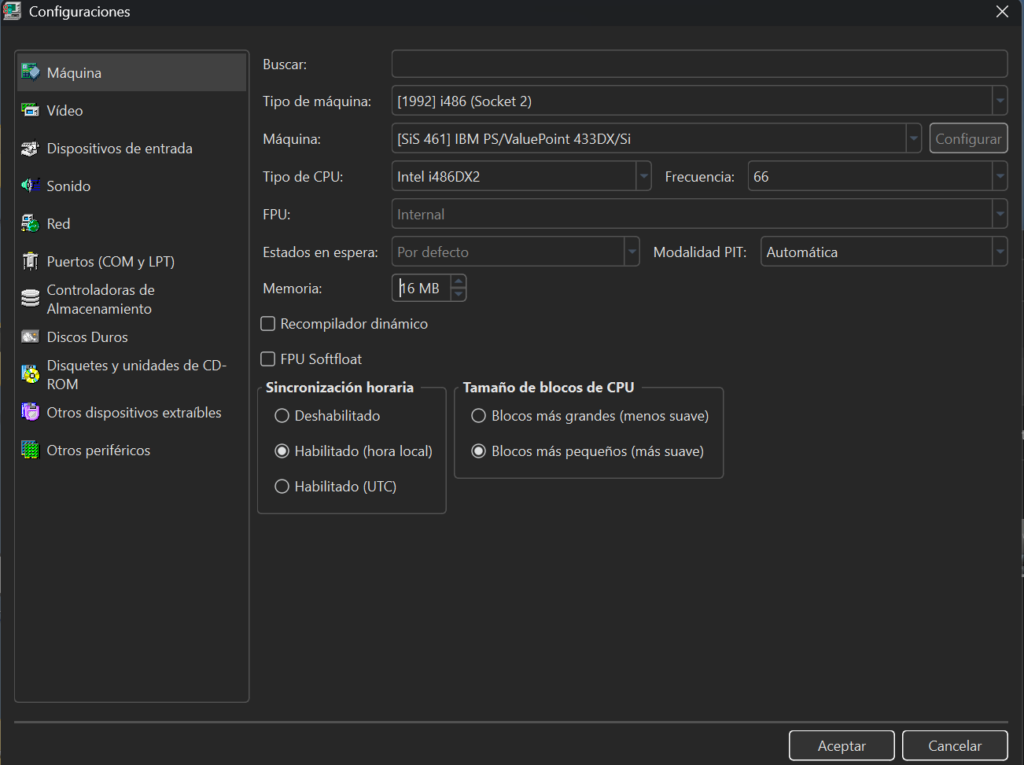
Configuración recomendada
Para empezar, recomiendo una configuración equilibrada:
Apartado
Valor recomendado
Máquina
IBM PS/ValuePoint 433DX o 466DX2, si está disponible
CPU
Intel 486DX2 a 66 MHz
RAM
16 MB
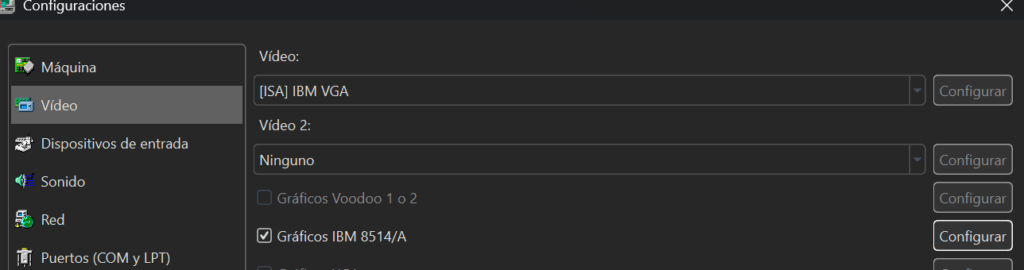
Vídeo
SVGA integrado o compatible
Disco duro
IDE de 504 MB
Disquetera
3.5” 1.44 MB
CD-ROM
IDE ATAPI
Sonido
Sound Blaster 16 ISA
Sistema operativo
MS-DOS 6.22 + Windows 3.11
Alternativa
Windows 95 si se quiere probar algo más moderno
86Box sigue actualizándose y ha recibido correcciones relacionadas con modelos IBM PS/ValuePoint, por ejemplo en versiones recientes se mencionan ajustes sobre el vídeo integrado del IBM PS/ValuePoint 433DX/Si.
Paso 1. Crear una nueva máquina en 86Box
Abrimos 86Box y creamos una nueva configuración.
Abrimos 86Box.
Creamos una nueva máquina.
Elegimos una categoría de equipos 486.
Buscamos un modelo relacionado con IBM PS/ValuePoint.
Seleccionamos un modelo como:
IBM PS/ValuePoint 433DX
IBM PS/ValuePoint 466DX2
IBM PS/ValuePoint P60, si queremos probar una configuración más moderna tipo Pentium.
Para este post recomiendo trabajar con un 486DX2, porque es más representativo de la época DOS/Windows 3.1.
Paso 2. Configurar el procesador
En la sección de CPU seleccionamos:
Opción
Valor
Procesador
Intel 486DX2
Velocidad
66 MHz
FPU
Integrada, si usamos DX/DX2
Modo dinámico
Activado si 86Box lo permite
Un 486DX2 a 66 MHz es una configuración excelente para juegos de 1992-1994.
Paso 3. Configurar la memoria RAM
Configuramos la memoria en:
Uso
RAM recomendada
Solo MS-DOS
4 MB u 8 MB
MS-DOS + Windows 3.1
8 MB o 16 MB
Windows 95
16 MB o 32 MB
Para esta práctica usaremos:
16 MB de RAM
Es suficiente para DOS, Windows 3.11 y una buena cantidad de juegos.
Paso 4. Configurar el disco duro
Creamos un disco duro IDE.
Recomendación:
Parámetro
Valor
Tipo
IDE
Tamaño
504 MB
Formato
Imagen nueva
Uso
Sistema operativo + juegos
¿Por qué 504 MB? Porque muchos equipos antiguos tenían limitaciones de BIOS con discos grandes. Para evitar problemas, es mejor empezar con un disco pequeño y compatible. En conversaciones de usuarios reales sobre PS/ValuePoint se mencionan límites prácticos cercanos a 500 MB en algunos modelos 6382.
Paso 5. Añadir disquetera
Configuramos una disquetera:
Opción
Valor
Unidad A:
3.5” 1.44 MB
Imagen inicial
Disco 1 de MS-DOS 6.22
Esto nos permitirá arrancar el instalador de MS-DOS.
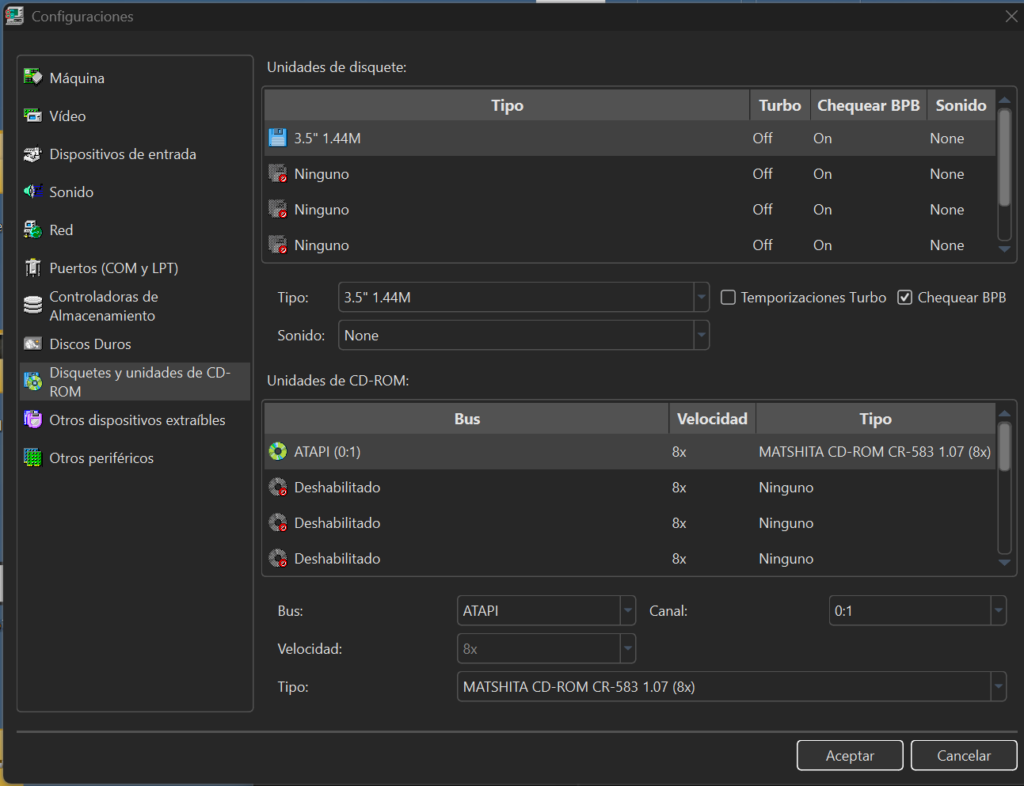
Paso 6. Añadir CD-ROM
Añadimos una unidad de CD-ROM IDE/ATAPI.
Opción
Valor recomendado
Tipo
IDE ATAPI CD-ROM
Canal
Secundario maestro, si está disponible
Uso
Instalar juegos, drivers y Windows
Si el CD-ROM no aparece dentro de DOS, no es un fallo raro. En MS-DOS hay que cargar un driver en CONFIG.SYS y después MSCDEX.EXE en AUTOEXEC.BAT.
Paso 7. Configurar tarjeta de sonido
Añadimos una tarjeta de sonido compatible.
Recomendación:
Opción
Valor
Tarjeta
Sound Blaster 16
Puerto
220
IRQ
5 o 7
DMA
1
High DMA
5
MPU-401
330
Configuración típica:
BLASTER=A220 I5 D1 H5 P330 T6
Esta configuración será importante para juegos como Doom, Duke Nukem II o Monkey Island 2.
Paso 8. Primer arranque
Montamos el primer disquete de MS-DOS 6.22 y arrancamos la máquina.
Si todo va bien, aparecerá el instalador de MS-DOS.
Si aparece un error del tipo “no boot disk” o “no system disk”, revisamos:
Que el disquete esté montado en la unidad A:
Que el orden de arranque permita arrancar desde disquete.
Que la imagen del disquete sea arrancable.
Que la máquina tenga una disquetera configurada.
Crear partición con FDISK
Si el disco está vacío, MS-DOS necesitará crear una partición.
Desde el disquete de arranque podemos ejecutar:
FDISK
Dentro de FDISK:
Crear partición primaria DOS.
Usar todo el tamaño del disco.
Marcar la partición como activa.
Salir de FDISK.
Reiniciar la máquina.
Importante: después de crear la partición hay que reiniciar. Si no reiniciamos, DOS puede no reconocer correctamente el disco.
Formatear el disco duro
Después de reiniciar con el disquete de DOS, ejecutamos:
FORMAT C: /S
Esto formatea el disco C: y copia los archivos básicos del sistema para que pueda arrancar.
Cuando termine, podemos poner una etiqueta al disco, por ejemplo:
VALUEPOINT
Instalar MS-DOS
Ejecutamos el instalador desde el disquete:
A: SETUP
Seguimos los pasos del instalador e iremos cambiando los disquetes cuando nos lo pida.
Al finalizar, quitamos el disquete y reiniciamos.
Si todo ha ido bien, el sistema arrancará desde el disco duro C:.
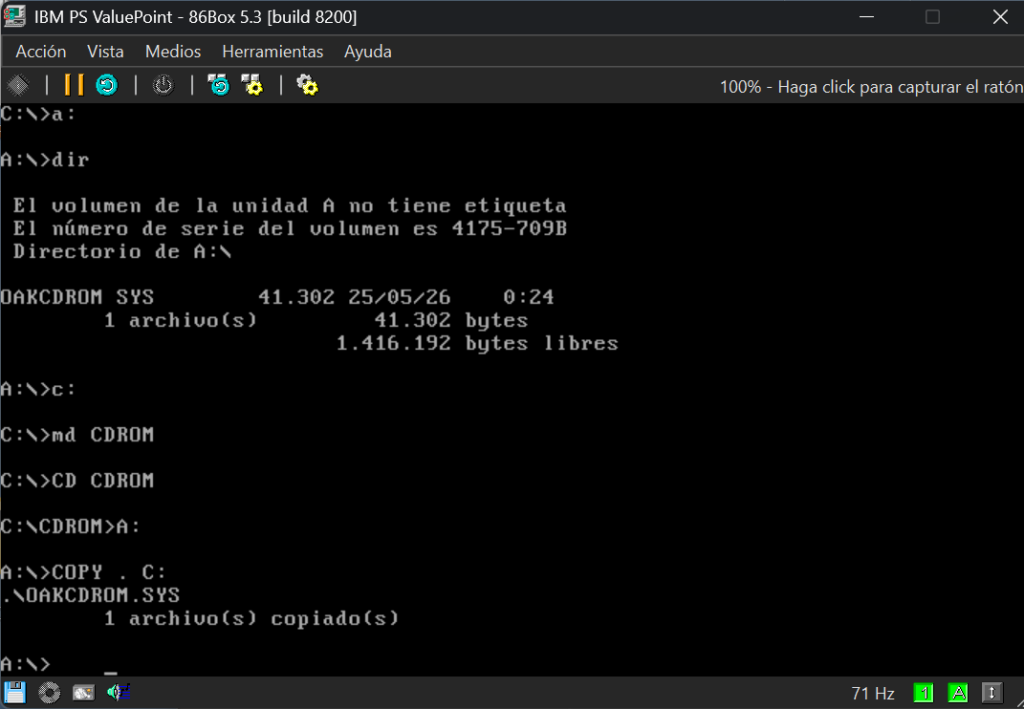
Configurar el CD-ROM en MS-DOS
Para que MS-DOS detecte el CD-ROM necesitamos un driver. Uno de los más habituales es:
OAKCDROM.SYS
Podemos copiarlo a una carpeta, por ejemplo:
C:\CDROM
Creamos la carpeta:
MD C:\CDROM
Copiamos el driver:
COPY A:\OAKCDROM.SYS C:\CDROM
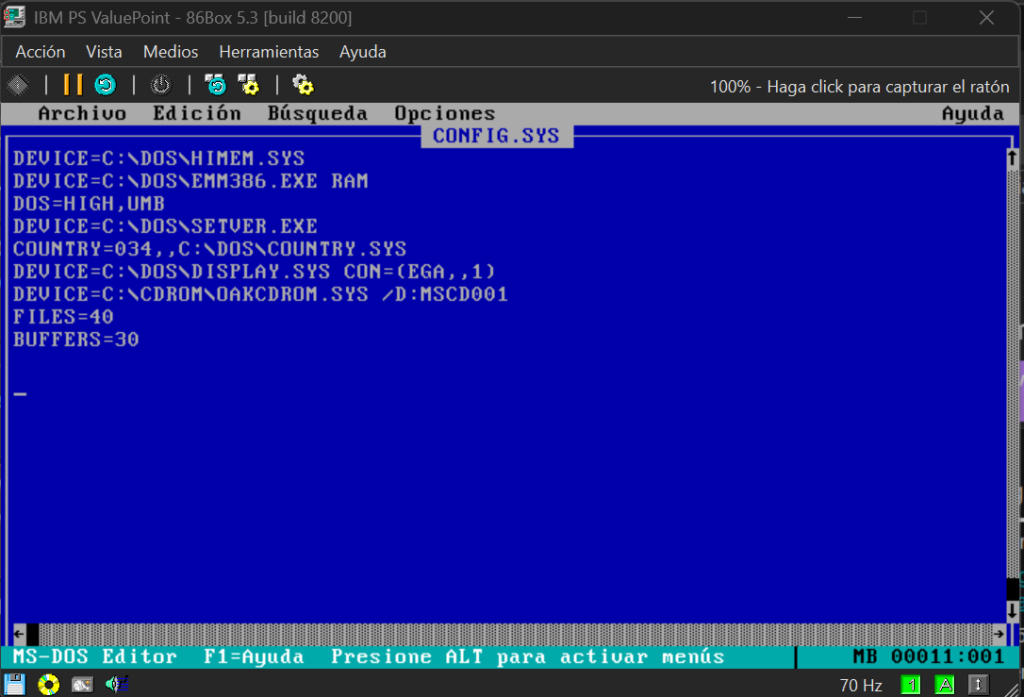
Editamos CONFIG.SYS:
EDIT C:\CONFIG.SYS
Añadimos:
DEVICE=C:\CDROM\OAKCDROM.SYS /D:MSCD001
Ahora editamos AUTOEXEC.BAT:
EDIT C:\AUTOEXEC.BAT
Añadimos:
C:\DOS\MSCDEX.EXE /D:MSCD001 /L:D
Reiniciamos.
Si todo va bien, el CD-ROM aparecerá como unidad D:.
Configurar memoria para juegos
Muchos juegos de DOS necesitan memoria convencional libre. Podemos mejorar la configuración usando HIMEM.SYS y EMM386.EXE.
Una de las formas más cómodas de pasar archivos desde nuestro equipo moderno a una máquina emulada en 86Box es crear una imagen ISO. Esta imagen se comportará como si fuera un CD-ROM real dentro del ordenador emulado.
Para hacerlo podemos utilizar ImgBurn, una herramienta clásica para crear y grabar imágenes de disco. Aunque su interfaz tiene un aspecto algo antiguo, sigue siendo muy útil para este tipo de tareas retro.
La idea es sencilla: primero preparamos una carpeta en nuestro ordenador con todos los archivos que queremos llevar a MS-DOS o Windows 9x, y después convertimos esa carpeta en un archivo .iso.
Por ejemplo, podemos crear una carpeta llamada:
C:\CD_86BOX
Dentro de esa carpeta podemos meter juegos, drivers, utilidades, instaladores o cualquier archivo que queramos usar dentro de la máquina virtual:
Una vez preparada la carpeta, abrimos ImgBurn y seleccionamos la opción:
Create image file from files/folders
Esta opción permite crear una imagen ISO a partir de una carpeta de nuestro disco duro.
Después añadimos la carpeta que hemos preparado, elegimos dónde queremos guardar la imagen ISO resultante y pulsamos el botón para crearla. Por ejemplo, podemos guardar el archivo como:
C:\ISOS\cd_86box.iso
Cuando termine el proceso, ya tendremos un CD-ROM virtual listo para usar en 86Box.
Instalación de Windows 3.11 desde una ISO de CD-ROM
Una vez que el IBM PS/ValuePoint ya tiene MS-DOS instalado, el siguiente paso lógico es añadir un entorno gráfico clásico. Para este proyecto vamos a instalar Windows 3.11 desde una imagen ISO montada como CD-ROM en 86Box.
Aunque Windows 3.11 se distribuía normalmente en disquetes, para trabajar de forma más cómoda en el emulador podemos preparar una ISO con los archivos de instalación. Esto facilita mucho el proceso, evita tener que cambiar disquetes constantemente y nos permite tener en un único CD virtual tanto Windows como drivers, utilidades y pequeños programas de la época.
Requisitos previos
Antes de empezar, el sistema debe tener:
Elemento
Estado necesario
MS-DOS
Instalado y arrancando desde C:
CD-ROM
Detectado como unidad D:
Driver CD-ROM
OAKCDROM.SYS cargado en CONFIG.SYS
MSCDEX
Cargado en AUTOEXEC.BAT
Ratón
Recomendable, aunque no imprescindible
RAM
Mínimo 4 MB, recomendado 8 MB o 16 MB
Para comprobar que el CD-ROM funciona, desde DOS podemos escribir:
D: DIR
Si aparece el contenido del CD, ya podemos continuar con la instalación.
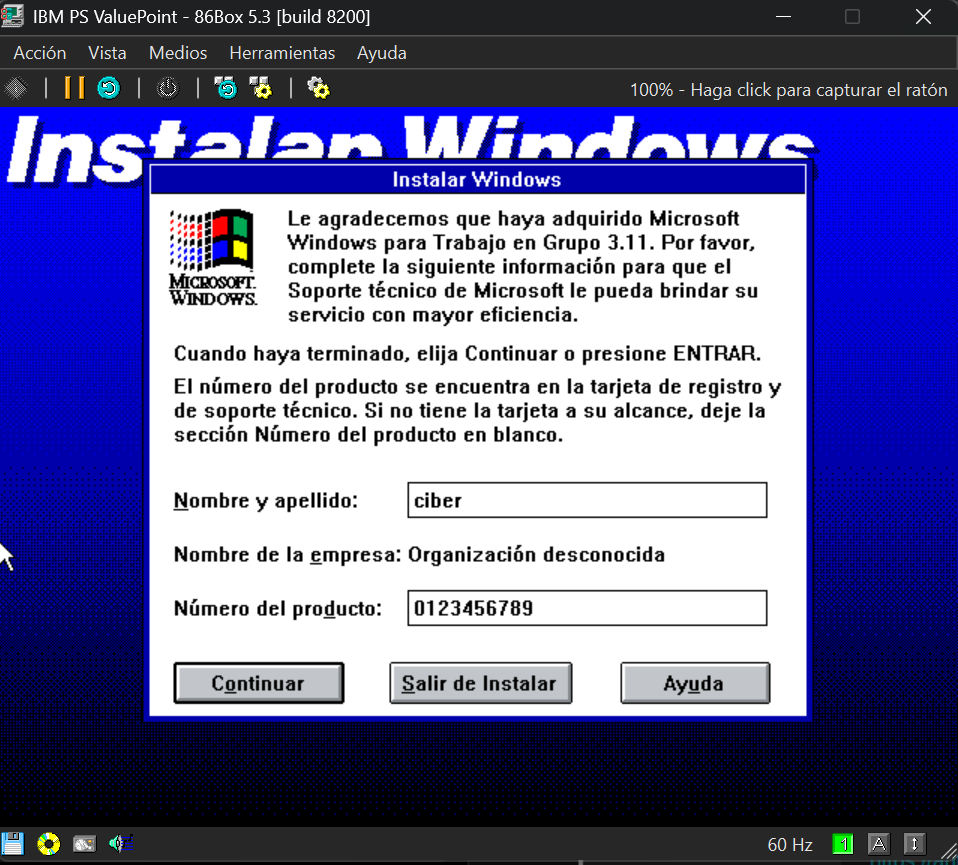
Durante la instalación de Windows para Trabajo en Grupo 3.11, Microsoft solicitaba un nombre de usuario, una organización y un número de producto. Este número venía normalmente en la tarjeta de registro, en la documentación original o en el material incluido con la licencia del programa.
A diferencia de las versiones modernas de Windows, este número no funcionaba como una activación online. En aquella época no existía todavía el sistema de validación por Internet que asociamos a Windows XP, Windows 10 o Windows 11. El instalador simplemente pedía el dato como parte del proceso de registro e identificación del producto.
Esto refleja muy bien cómo era el software comercial de principios de los años 90: el control de licencia dependía mucho más de la documentación física, los manuales, los certificados de autenticidad, las etiquetas y los disquetes o CD originales. El número de producto servía para identificar la copia instalada y facilitar el soporte técnico, pero el sistema no se conectaba a ningún servidor para comprobarlo.
En nuestro caso, dentro del laboratorio retro con 86Box, esta pantalla resulta curiosa porque nos recuerda una época en la que instalar Windows era también un pequeño ritual: escribir el nombre, la empresa, el número del producto, elegir componentes, seleccionar el tipo de pantalla, configurar impresoras y terminar arrancando el clásico Administrador de programas.
Una vez instalado ponemos en la terminal:
win
Instalar DOOM desde una imagen de CD
Para instalar DOOM en nuestro IBM PS/ValuePoint emulado con 86Box, he optado por un método sencillo y bastante cómodo: crear una imagen ISO con los archivos del juego y montarla como si fuera un CD-ROM dentro de la máquina virtual.
Una vez creada la ISO y configurado correctamente el lector de CD-ROM en MS-DOS, el sistema detecta la unidad como D:. Desde ahí podemos comprobar el contenido del disco con:
D: DIR
En este caso, la imagen contiene directamente los archivos del juego, así que no necesitamos un instalador complejo. Basta con crear una carpeta en el disco duro de la máquina y copiar allí el contenido del CD.
Por ejemplo:
C: CD \ MD DOOM COPY D:\*.* C:\DOOM
Si el juego está dentro de una carpeta del CD, por ejemplo D:\DOOM, usaríamos:
C: CD \ MD DOOM COPY D:\DOOM\*.* C:\DOOM
Después entramos en la carpeta del juego:
CD \DOOM DIR
Y buscamos el ejecutable principal. Normalmente encontraremos archivos como:
DOOM.EXE SETUP.EXE README.TXT
Antes de jugar conviene ejecutar el programa de configuración:
SETUP
Desde ahí podemos ajustar el sonido, la música y los controles. En una máquina emulada es habitual tener que probar varias opciones de sonido hasta encontrar la que mejor funciona.
Finalmente, para ejecutar el juego:
DOOM
Si el juego arranca pero no reconoce el ratón, no es un fallo de DOOM: MS-DOS necesita tener cargado previamente un controlador de ratón, como CTMOUSE.EXE o MOUSE.COM. Que el ratón funcione en Windows 3.11 no significa necesariamente que esté disponible también para los juegos de DOS.
Este método de instalación es muy práctico porque nos permite preparar los archivos cómodamente desde nuestro ordenador actual, crear una ISO y usarla en 86Box como si fuera un CD real. Para un proyecto retro, además, mantiene bastante bien la sensación de estar trabajando con hardware y software de la época.
🎧 Resumen en audio del tema Escucha este audio para repasar las ideas y los objetivos principales de este proyecto antes de continuar o al finalizar la lectura.
En muchas ocasiones, cuando trabajamos redes, sistemas, servidores, Raspberry Pi, sensores, monitorización o ciberseguridad, necesitamos montar pequeños laboratorios de prueba. A veces basta con una máquina virtual, otras veces usamos varias Raspberry, un switch, un router, discos duros, sensores, placas Arduino o algún equipo adicional.
El problema es que estos montajes suelen acabar ocupando demasiado espacio sobre la mesa: cables por todas partes, transformadores, regletas, adaptadores, tarjetas microSD, discos externos, pantallas, teclados, routers, switches y placas sueltas.
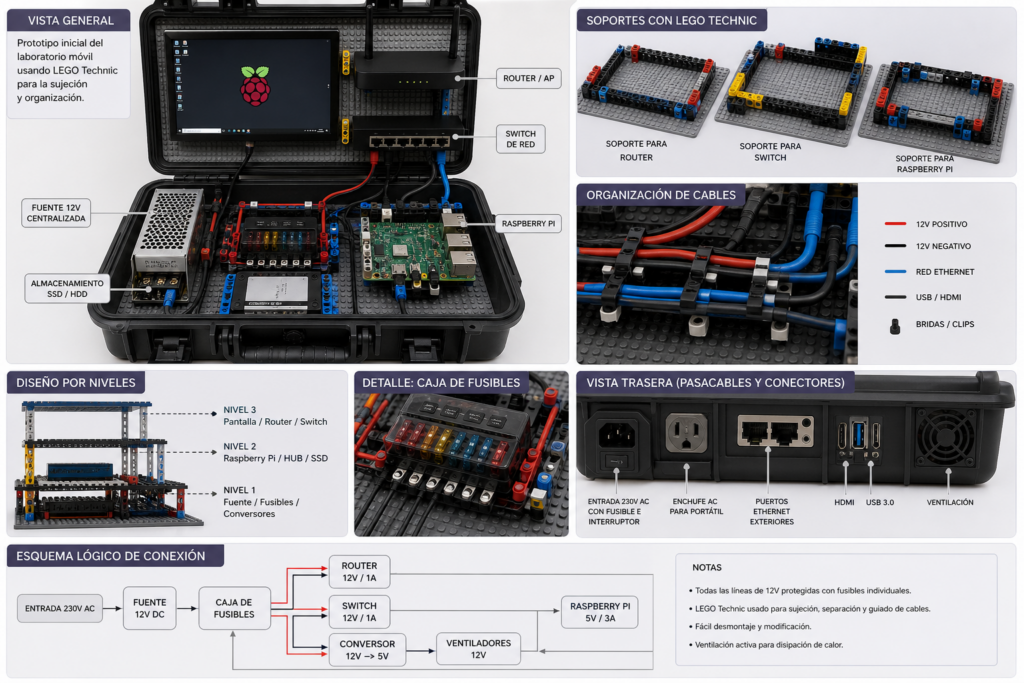
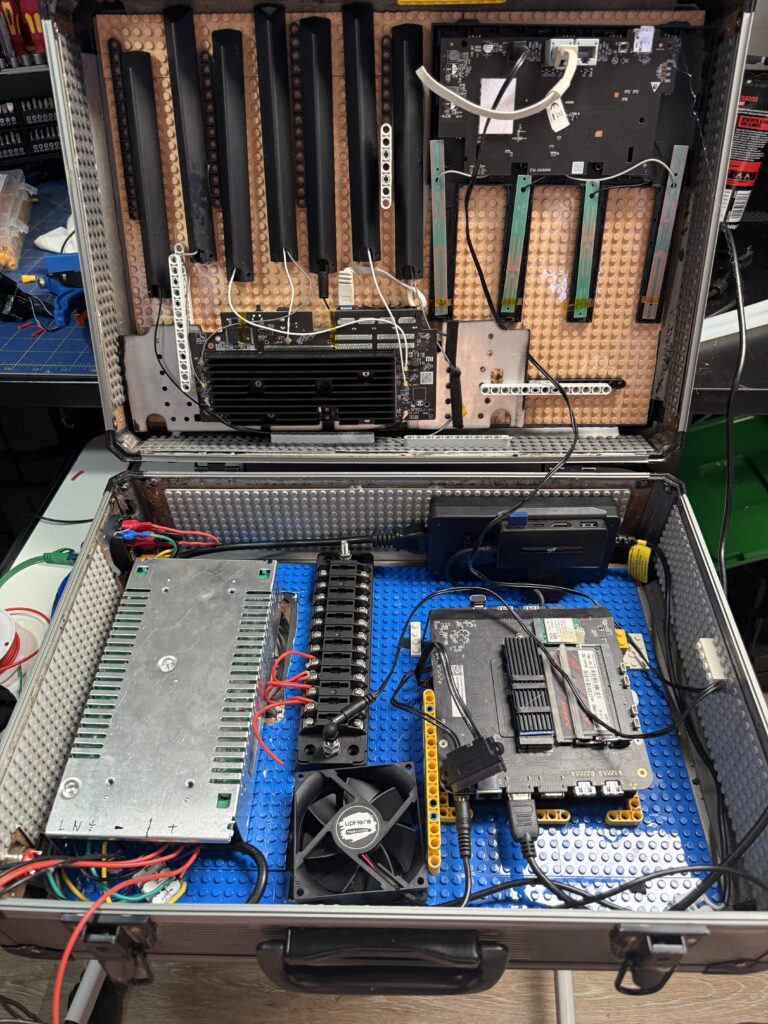
Por eso he decidido empezar un proyecto personal que iré documentando paso a paso: construir un laboratorio móvil dentro de una maleta, pensado para poder transportarlo, conectarlo rápidamente y usarlo como herramienta de trabajo en diferentes proyectos de ASIR, redes, sistemas y ciberseguridad.
No se trata de una práctica para que la realicen directamente los alumnos, al menos no en esta primera fase. La idea es construir una herramienta propia que después pueda utilizar en clase, en demostraciones, en laboratorios guiados y en proyectos más avanzados.
¿Qué quiero construir?
La idea inicial es montar una maleta rígida en cuyo interior irán fijados diferentes dispositivos de red y computación. Algunos de los elementos que estoy valorando incluir son:
un router o punto de acceso;
un switch de red;
una o varias Raspberry Pi;
una pantalla integrada;
discos SSD o discos duros externos;
alimentación centralizada;
ventilación;
conectores accesibles desde el exterior;
cableado interno ordenado;
posiblemente sensores, Arduino u otros módulos según evolucione el proyecto.
La intención es que todo quede montado de forma fija, ordenada y segura, evitando tener que sacar y conectar cada elemento cada vez que quiera usar el laboratorio.
La maleta funcionaría como una pequeña infraestructura portátil:
Maleta abierta │ ├── Router / punto de acceso ├── Switch ├── Raspberry Pi ├── Almacenamiento ├── Pantalla ├── Alimentación interna └── Conexiones de red y periféricos
¿Para qué puede servir este laboratorio móvil?
Este proyecto puede tener muchas aplicaciones dentro de la enseñanza de informática, especialmente en ciclos como ASIR y en módulos relacionados con redes, sistemas y ciberseguridad.
Algunas ideas de uso son:
montar una pequeña red aislada para pruebas;
crear un entorno de ciberseguridad controlado;
simular una red de empresa;
desplegar servicios en Raspberry Pi;
practicar escaneos de red con herramientas como Nmap;
montar laboratorios con IDS, SIEM o monitorización;
hacer pruebas con sensores y recogida de datos;
crear un pequeño servidor portátil;
trabajar con copias de seguridad y almacenamiento;
enseñar conceptos de segmentación, servicios, puertos y tráfico de red;
documentar instalaciones reales paso a paso.
No quiero que sea simplemente una “caja con aparatos”. La idea es que sea una plataforma didáctica reutilizable.
Objetivos del proyecto
El objetivo principal es construir un laboratorio portátil, funcional y documentado, que pueda utilizarse en diferentes contextos educativos y técnicos.
Objetivos técnicos
Diseñar una maleta con dispositivos montados de forma fija.
Centralizar la alimentación para evitar múltiples transformadores.
Mantener separada la parte de 230 V AC de la parte de baja tensión DC.
Usar fusibles y protecciones para cada línea de alimentación.
Integrar router, switch, Raspberry Pi y almacenamiento.
Preparar ventilación para evitar problemas de temperatura.
Ordenar el cableado interno de forma clara y mantenible.
Dejar el montaje preparado para futuras ampliaciones.
Objetivos didácticos
Mostrar a los alumnos cómo se planifica un proyecto técnico real.
Documentar decisiones, errores y mejoras.
Enseñar buenas prácticas de montaje, seguridad y organización.
Usar el laboratorio como base para prácticas de redes, sistemas y ciberseguridad.
Crear material reutilizable para futuras clases.
Mostrar que la informática no es solo software: también hay infraestructura, electricidad, hardware, montaje y mantenimiento.
Por qué hacerlo dentro de una maleta
Una maleta rígida permite crear un entorno compacto, transportable y relativamente protegido.
Las ventajas principales son:
Ventaja
Explicación
Portabilidad
Se puede llevar de un aula a otra o guardar fácilmente
Orden
Los dispositivos quedan fijados y cableados
Rapidez
Se abre, se conecta y se empieza a trabajar
Protección
Los equipos quedan más protegidos que si estuvieran sueltos
Reutilización
Sirve para muchos proyectos diferentes
Presentación
Visualmente es más atractivo para explicar conceptos
También tiene inconvenientes que hay que tener en cuenta:
Riesgo
Medida prevista
Calor interno
Añadir ventiladores y rejillas
Exceso de cableado
Usar distribución ordenada y etiquetas
Seguridad eléctrica
Separar 230 V y baja tensión
Mantenimiento
Montar los equipos de forma accesible
Ampliaciones futuras
Dejar espacio libre y conectores preparados
Primera fase: definir la arquitectura
Antes de cortar, atornillar o comprar componentes sin control, la primera fase será definir una arquitectura básica.
La idea inicial podría ser algo así:
Entrada 230 V AC │ ├── Enchufe interno para portátil o cargador auxiliar │ └── Fuente 230 V AC → 12 V DC │ ├── Router 12 V ├── Switch 12 V ├── Ventiladores 12 V └── Conversor 12 V → 5 V └── Raspberry Pi
La parte importante aquí es que no todos los dispositivos funcionan al mismo voltaje.
Por ejemplo:
el router puede necesitar 12 V;
el switch puede necesitar 5 V, 9 V o 12 V;
la Raspberry necesita 5 V;
los ventiladores pueden ir a 5 V o 12 V;
un portátil normalmente necesita su propio cargador a 230 V.
Por tanto, una de las primeras tareas será identificar el consumo real de cada equipo.
Alimentación: una de las partes más importantes
Uno de los puntos más delicados del proyecto es la alimentación eléctrica.
La solución más simple sería meter una regleta dentro de la maleta y conectar todos los transformadores originales, pero no es la opción más limpia ni la más eficiente en espacio.
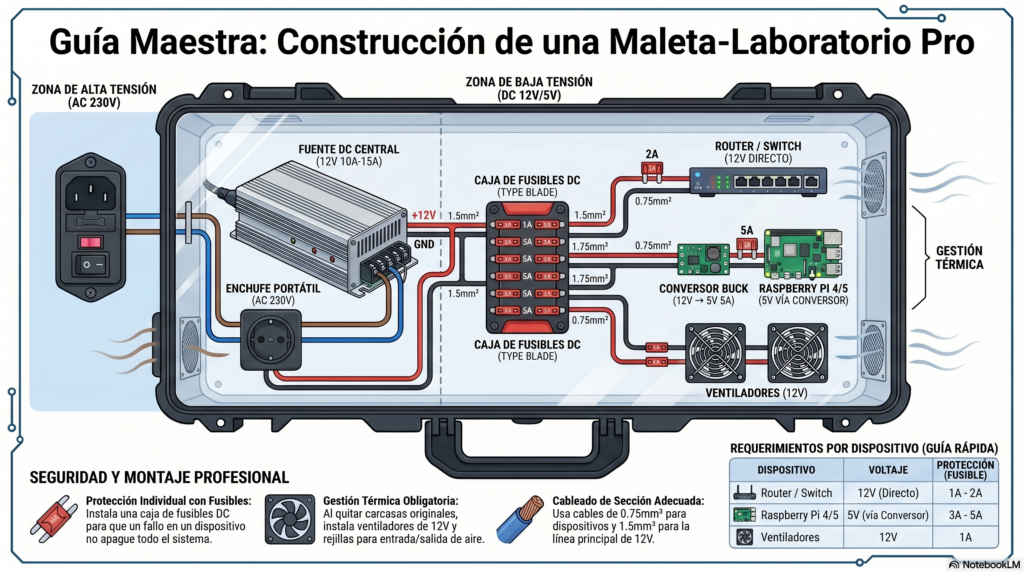
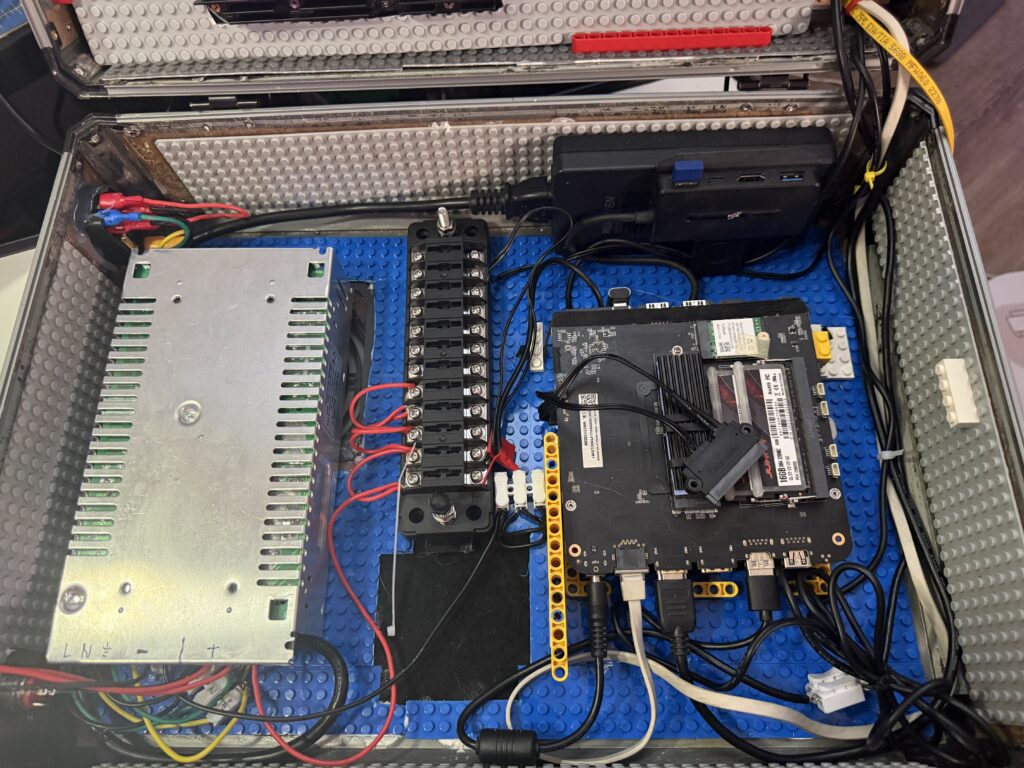
La solución que estoy valorando es usar una fuente central de 12 V y, desde ahí, repartir la alimentación mediante una caja de fusibles y conversores DC-DC.
Un posible esquema sería:
Fuente 12 V │ ├── Fusible 2 A → Router ├── Fusible 2 A → Switch ├── Fusible 3 A → Conversor 12 V a 5 V → Raspberry ├── Fusible 1 A → Ventiladores └── Fusible 1 A → Pantalla o accesorios
Esto permite tener una instalación más ordenada, pero también obliga a hacerlo con cuidado.
No se trata solo de que “funcione”. Tiene que ser seguro, mantenible y comprensible.
Seguridad antes que estética
Aunque el objetivo es que la maleta quede bien presentada, la prioridad será siempre la seguridad.
Algunas normas que quiero seguir desde el principio:
no dejar conexiones de 230 V expuestas;
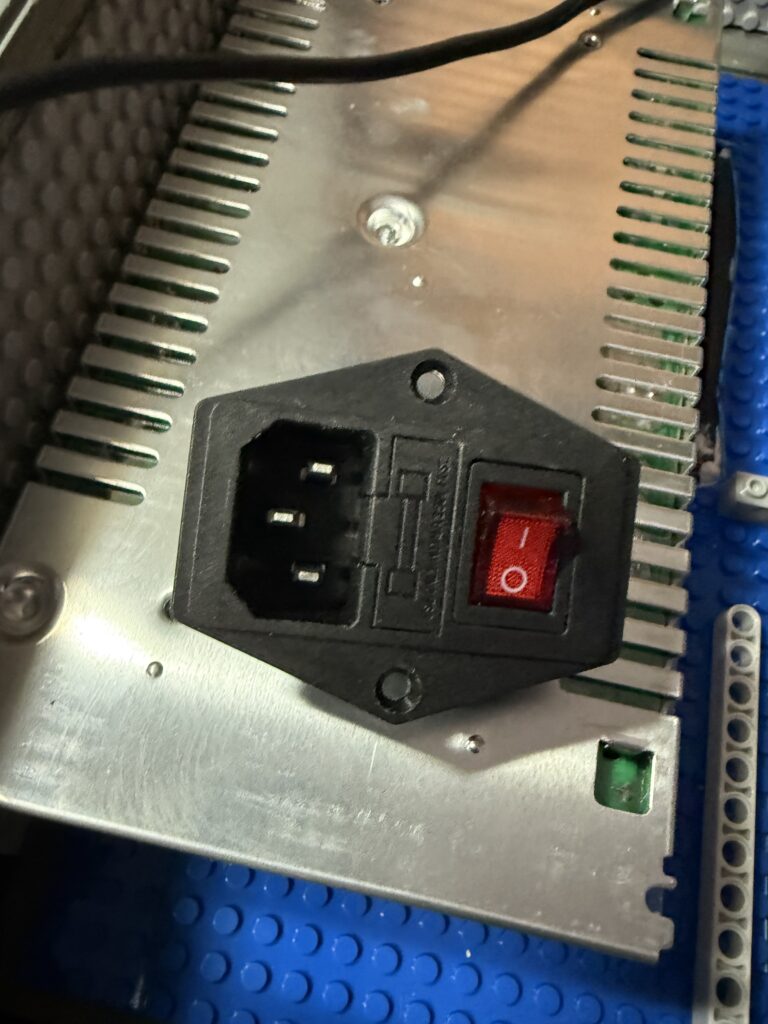
usar entrada de corriente con interruptor y fusible;
separar físicamente la zona de alta tensión y la zona de baja tensión;
proteger cada línea de 12 V con su fusible;
usar cable de sección adecuada;
evitar cables finos tipo Arduino para alimentar equipos;
comprobar polaridad y voltaje con multímetro antes de conectar nada;
añadir ventilación;
etiquetar cables y conexiones;
documentar cada cambio.
Esto también forma parte del aprendizaje. Muchas veces en clase enseñamos servicios, comandos, configuraciones y herramientas, pero no siempre se ve la parte física de montar una pequeña infraestructura de forma ordenada.
Posibles usos en ciberseguridad
Uno de los motivos principales para construir esta maleta es poder usarla como base para laboratorios de ciberseguridad.
Algunas posibilidades futuras:
1. Laboratorio de escaneo y reconocimiento
Usar la red interna de la maleta para practicar:
descubrimiento de hosts;
escaneo de puertos;
identificación de servicios;
pruebas con Nmap;
análisis de tráfico.
2. Mini SOC educativo
Integrar herramientas como:
Wazuh;
Suricata;
Grafana;
Prometheus;
logs centralizados;
alertas básicas.
3. Red aislada de pruebas
Crear un entorno donde se puedan levantar máquinas vulnerables o servicios de prueba sin afectar a la red real del aula.
4. Servidor portátil
Una Raspberry con almacenamiento podría actuar como:
servidor web;
servidor de ficheros;
servidor de logs;
panel de control;
repositorio local de documentación o scripts.
5. Simulación de red empresarial
Con router, switch y varios nodos se puede representar una pequeña red con:
clientes;
servidores;
segmentos;
servicios internos;
reglas de firewall;
monitorización.
Documentar el proceso: una parte esencial del proyecto
Este proyecto no solo consistirá en montar la maleta. También quiero documentar cada fase.
La documentación incluirá:
materiales utilizados;
decisiones de diseño;
esquemas de conexión;
pruebas realizadas;
problemas encontrados;
soluciones aplicadas;
fotografías del montaje;
configuraciones de red;
scripts utilizados;
posibles mejoras;
conclusiones de cada fase.
La idea es que cualquier persona que siga el proyecto pueda entender no solo el resultado final, sino también el razonamiento detrás de cada decisión.
Porque en proyectos reales rara vez todo sale perfecto a la primera. Hay que medir, probar, corregir, reorganizar y volver a probar.
Fases previstas del proyecto
Aunque el diseño todavía está abierto, una posible planificación inicial sería la siguiente:
Fase
Descripción
Fase 1
Definir objetivos y componentes iniciales
Fase 2
Elegir la maleta y diseñar la distribución interna
Fase 3
Planificar la alimentación eléctrica
Fase 4
Montar fuente, fusibles y distribución de 12 V
Fase 5
Integrar router, switch y Raspberry Pi
Fase 6
Añadir pantalla y almacenamiento
Fase 7
Configurar red interna y servicios básicos
Fase 8
Preparar primeros laboratorios de prueba
Fase 9
Documentar errores, mejoras y ampliaciones
Fase 10
Usar la maleta en proyectos reales de clase
Esta planificación podrá cambiar. De hecho, seguramente cambiará. Y eso también será parte del valor del proyecto.
Qué componentes estoy valorando
Por ahora, la lista de componentes posibles incluye:
Componente
Función
Maleta rígida
Estructura principal
Router
Crear o gestionar la red
Switch
Conectar varios equipos por cable
Raspberry Pi
Nodo principal de servicios
Pantalla
Visualización local
SSD/HDD
Almacenamiento
Fuente 12 V
Alimentación principal
Conversor 12 V a 5 V
Alimentar Raspberry
Caja de fusibles
Proteger líneas DC
Ventiladores
Refrigeración
Conectores de panel
Acceso externo ordenado
Cableado etiquetado
Mantenimiento
Interruptores
Control de encendido
Voltímetro/amperímetro
Supervisión de consumo
No todos tienen por qué estar desde el primer día. La idea es empezar con una base sencilla y hacerla crecer.
Qué quiero conseguir al final
Al terminar el proyecto me gustaría tener una herramienta que pueda abrir en clase y utilizar directamente.
Algo parecido a esto:
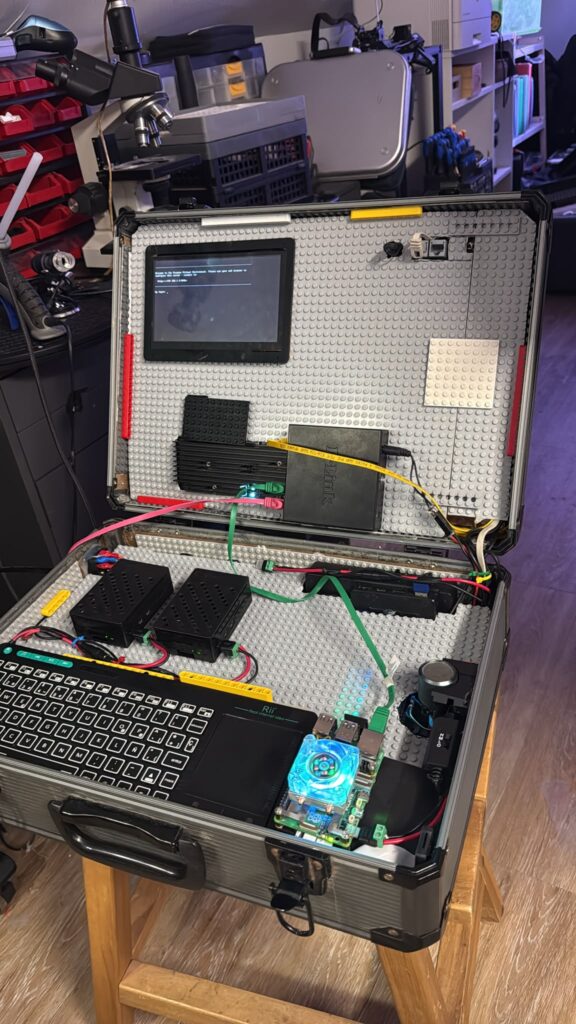
Abrir maleta │ ├── Conectar alimentación ├── Encender router/switch/Raspberry ├── Levantar servicios ├── Conectar portátil ├── Acceder al panel o terminal └── Empezar la práctica
Un laboratorio listo para trabajar.
No sustituirá a Proxmox, VirtualBox, Docker o las máquinas virtuales, pero sí puede complementarlas muy bien. Aporta algo físico, visible y tangible, que ayuda mucho cuando se explican redes, sistemas y seguridad.
Por qué merece la pena documentarlo
Este tipo de proyectos tienen un valor especial porque mezclan muchas áreas:
hardware;
redes;
sistemas;
electricidad básica;
Linux;
documentación;
seguridad;
automatización;
diseño;
resolución de problemas.
Es exactamente el tipo de proyecto que permite enseñar que la informática real no está formada por piezas aisladas. Todo se conecta con todo.
Un router no es solo un aparato con antenas. Una Raspberry no es solo una placa pequeña. Un switch no es solo una caja con puertos. Una fuente de alimentación no es un detalle secundario. Y una buena documentación no es un trámite: es lo que permite entender, mantener y mejorar el sistema.
Próximos pasos
En las siguientes entradas iré publicando el avance del proyecto.
Algunos de los próximos temas serán:
elección de la maleta;
diseño de la distribución interna;
elección de la fuente de alimentación;
montaje de la caja de fusibles;
conexión del router y el switch;
alimentación de la Raspberry;
integración de pantalla;
montaje del almacenamiento;
ventilación;
primeras pruebas de red;
primeras prácticas de ciberseguridad.
La idea es que este artículo sea el punto de partida de una serie. No quiero presentar solo el resultado final, sino todo el camino.
Conclusión
Este proyecto nace de una necesidad muy concreta: disponer de un laboratorio móvil, compacto y reutilizable para trabajar redes, sistemas y ciberseguridad de una forma más práctica y visual.
Todavía está en construcción. Algunas decisiones cambiarán, aparecerán problemas y seguramente habrá que rediseñar partes del montaje. Pero precisamente eso es lo interesante: convertir el proceso en aprendizaje.
A partir de aquí comienza la construcción del Laboratorio Móvil de Ciberseguridad.
Un proyecto para aprender, probar, equivocarse, mejorar y, sobre todo, llevar la práctica técnica un paso más allá.
Especificaciones para Montaje de Maleta-Laboratorio Electrónica
Elemento
Categoría
Voltaje Requerido
Amperaje/Potencia
Cantidad
Función
Fuente de alimentación AC/DC (Kingwen o similar)
Alimentación DC
Entrada: 230 V AC
12 V DC / 10 A – 20 A (120 W – 240 W)
1
Fuente principal para alimentar los dispositivos internos
Raspberry Pi 4/5
Cómputo
5 V DC
3 A – 5 A (15 W – 25 W)
Según diseño
Nodo de computación principal
Router
Red
12 V DC (típico)
1 A – 2 A
1
Gestión de red y conectividad
Switch Gigabit
Red
12 V DC (o 9 V / 5 V)
0.6 A – 1 A
1
Interconexión de los dispositivos de red
Conversor DC-DC Buck
Alimentación DC
Entrada: 12 V / Salida: 5 V
3 A – 5 A
1 por Raspberry
Reducir el voltaje de 12 V a 5 V para alimentar la Raspberry Pi
Caja de fusibles DC (Blade)
Seguridad
12 V DC
Soporte multi-vía
1
Protección individual de líneas (2 A para router, 3 A para RPi)
Entrada IEC C14 con interruptor y fusible
Alimentación AC
230 V AC
Protección por fusible
1
Punto de entrada único de corriente exterior para la maleta
Enchufe AC schuko / panel
Alimentación AC
230 V AC
Según cargador de portátil
1
Conexión interna para un ordenador portátil
Barra de distribución (Negativos)
Alimentación DC
12 V DC
Según carga total
1
Organización de los retornos de masa y negativos
Cable eléctrico flexible 1.5 mm2 – 2.5 mm2
Cableado
12 V DC
Línea principal
Varios metros
Cableado de alimentación desde la fuente a la distribución (evita caídas de tensión)
Cable eléctrico flexible 0.75 mm2
Cableado
12 V DC
Líneas de dispositivos
Varios metros
Conexión secundaria para router, switch y conversores
Cable 3 x 1.5 mm2 homologado
Cableado
230 V AC
Alta tensión
Varios metros
Conexión segura de entrada IEC y enchufe para portátil
Ventiladores 12 V
Climatización
12 V DC
2 W – 5 W
1 o 2
Extracción de calor y ventilación forzada para evitar sobrecalentamientos
Maleta rígida
Estructura
N/A
N/A
1
Carcasa y base del montaje del laboratorio
Placa interior de montaje
Estructura
N/A
N/A
1
Superficie para el anclaje y atornillado de todos los componentes
🎧 Resumen en audio del tema Escucha este audio para repasar las ideas y los objetivos principales de este proyecto antes de continuar o al finalizar la lectura.
En la primera parte del proyecto presenté la idea general: construir un laboratorio móvil dentro de una maleta, pensado para usarlo en clases, demostraciones y prácticas relacionadas con ASIR, redes, sistemas y ciberseguridad.
La idea no es construir un simple maletín con aparatos dentro, sino una pequeña plataforma técnica, transportable y reutilizable, que pueda servir para diferentes escenarios:
prácticas de redes;
laboratorios de ciberseguridad;
pruebas con Raspberry Pi;
despliegue de servicios;
análisis de tráfico;
monitorización;
almacenamiento;
automatización;
simulación de infraestructuras pequeñas.
Una vez planteada la idea general, llega una de las partes más importantes y, al mismo tiempo, una de las más complicadas para mí: cómo sujetar todos los elementos dentro de la maleta de forma ordenada, segura y modificable.
Podría utilizar madera, metacrilato, impresión 3D, piezas metálicas o soportes hechos a medida, pero en mi caso hay un condicionante importante: no tengo grandes conocimientos de carpintería, trabajo con plásticos o fabricación de piezas. Tampoco quiero que el proyecto se bloquee porque necesite herramientas especiales o un acabado perfecto desde el principio.
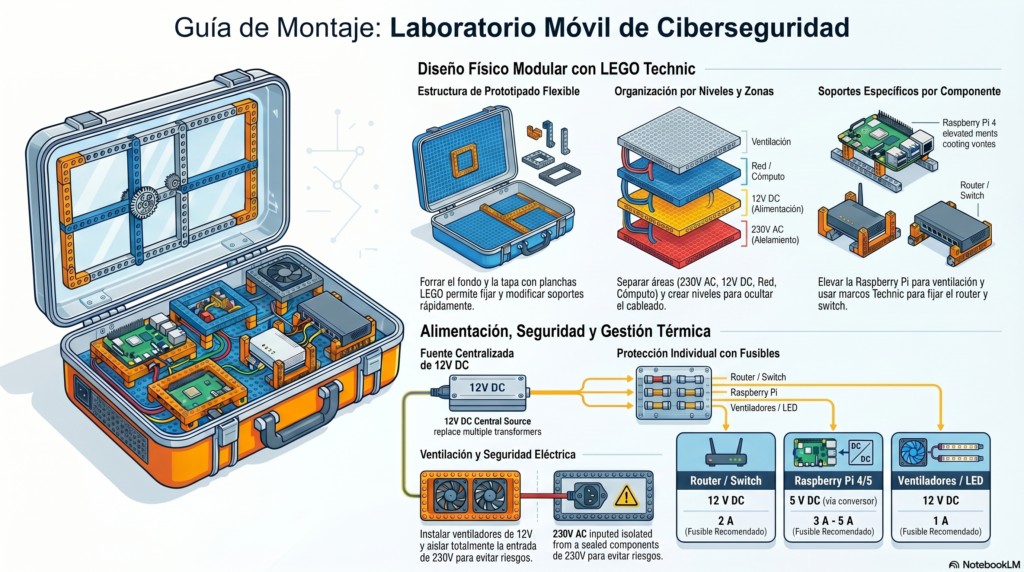
Por eso he decidido usar una solución más sencilla, modular y muy flexible: LEGO Technic.
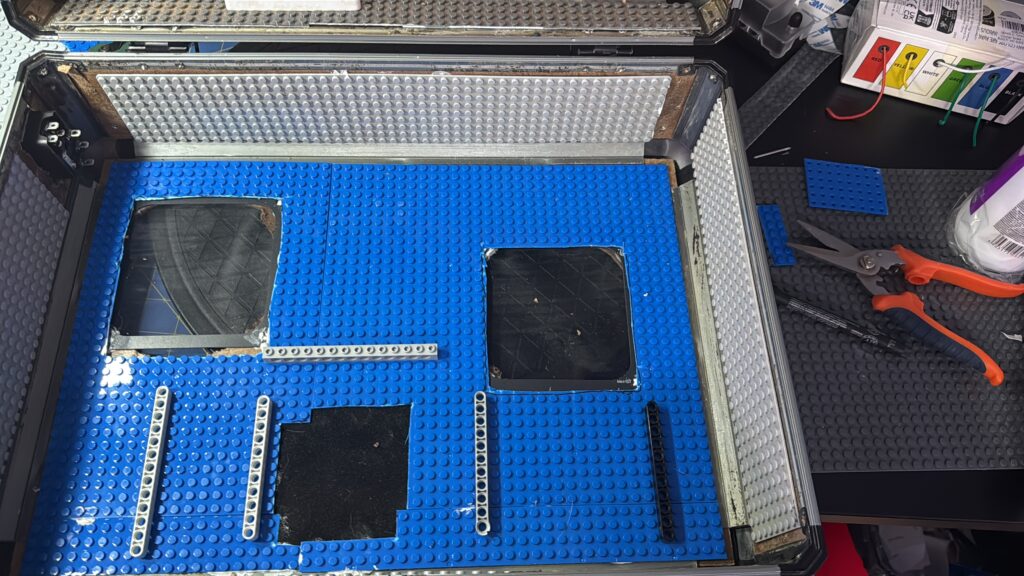
La idea principal
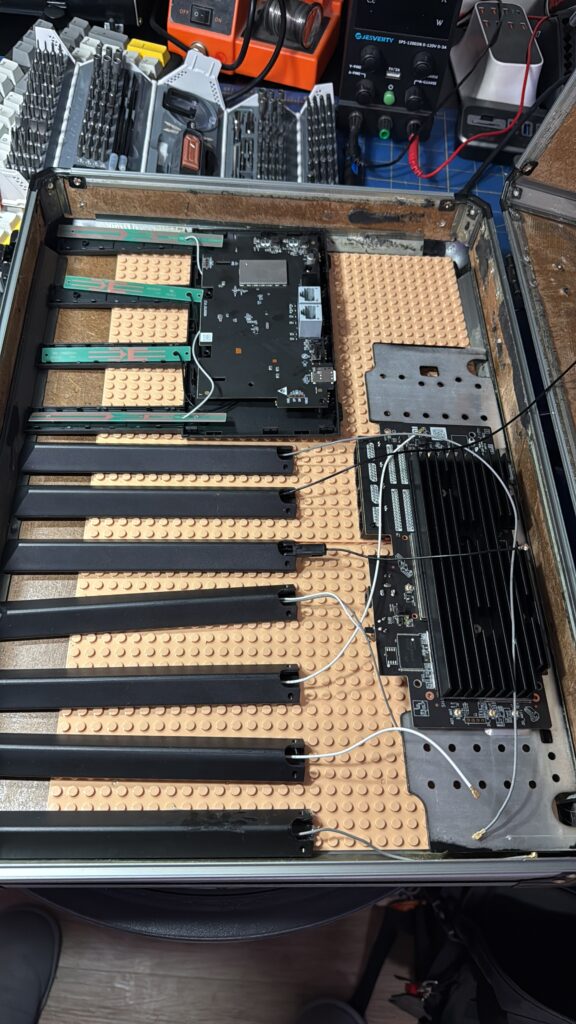
La idea es forrar el fondo de la maleta, y posiblemente también la tapa, con planchas base compatibles con LEGO. Sobre esas planchas iré construyendo estructuras con piezas LEGO Technic para sujetar los componentes, ordenar los cables y crear diferentes niveles o “pisos”.
De esta forma, en lugar de tener que cortar, taladrar y fabricar piezas a medida desde el primer día, podré ir probando distribuciones y modificarlas fácilmente.
La estructura inicial podría dividirse en dos zonas:
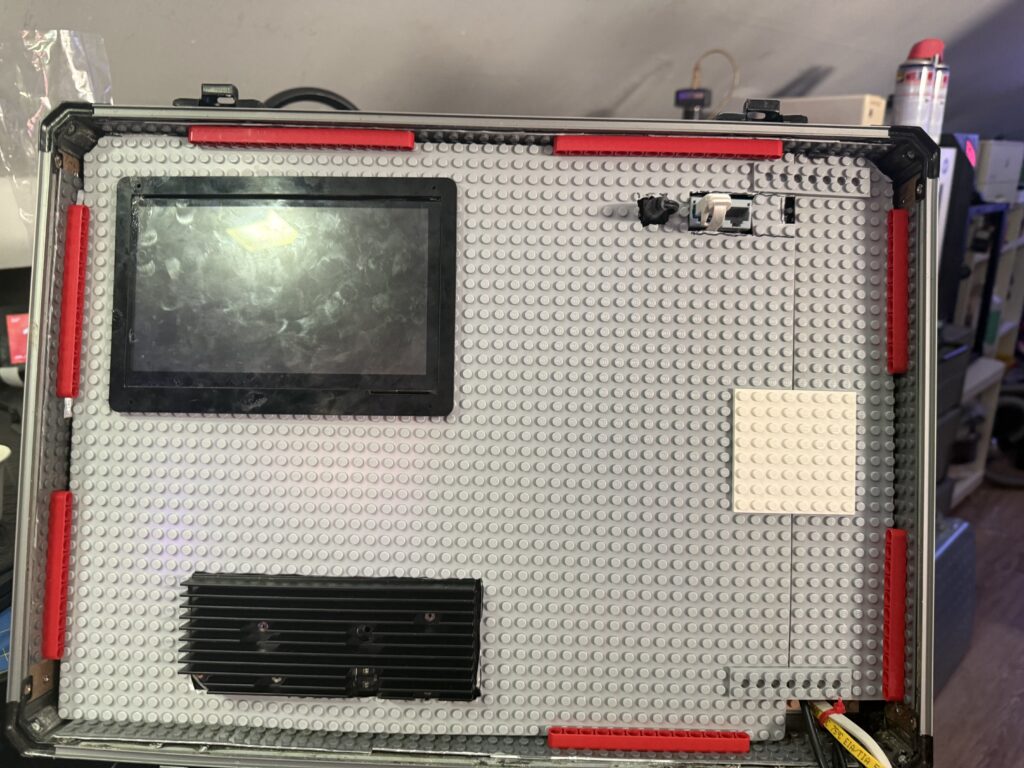
TAPA DE LA MALETA │ ├── Pantalla ├── Router o punto de acceso ├── Switch ├── Panel de conexiones └── Guiado de cables
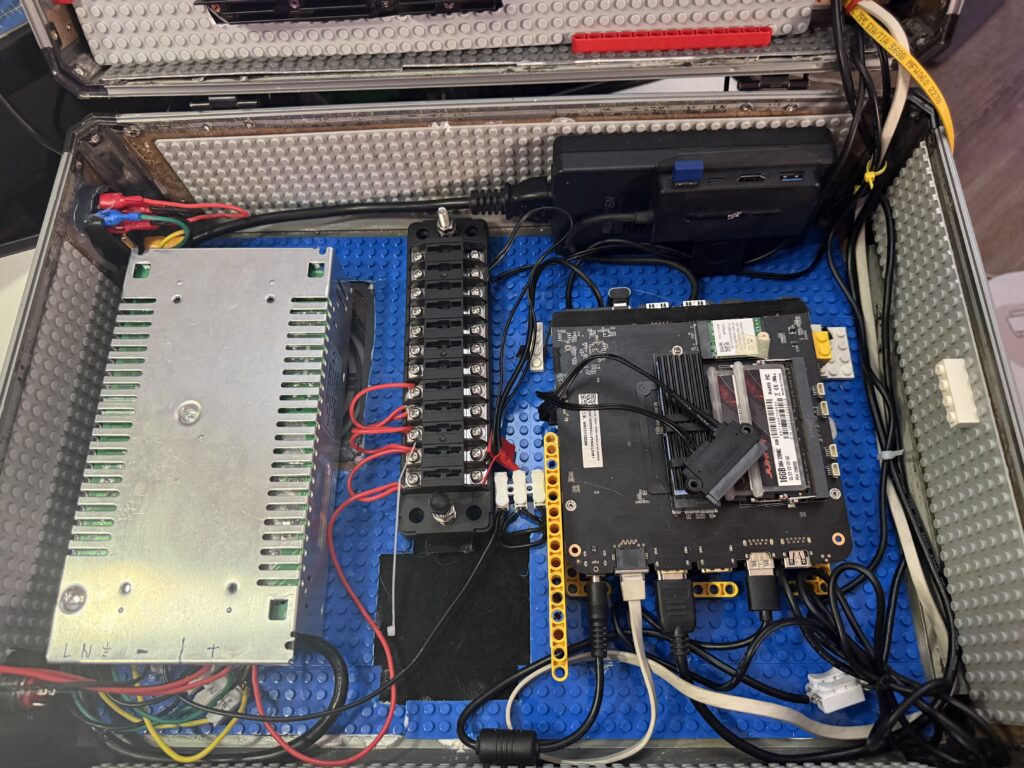
FONDO DE LA MALETA │ ├── Fuente de alimentación ├── Caja de fusibles ├── Conversores DC-DC ├── Raspberry Pi ├── SSD / HDD ├── Hub USB └── Canalización de cables
No busco que el primer diseño sea definitivo. De hecho, lo más probable es que vaya cambiando. Y precisamente esa es una de las razones por las que LEGO Technic puede funcionar muy bien en este proyecto.
Prototipo generado con IA
¿Por qué usar LEGO Technic?
A primera vista puede parecer una solución poco profesional, incluso algo improvisada. Sin embargo, para este tipo de proyecto tiene bastante sentido.
LEGO Technic permite crear estructuras resistentes, desmontables y ajustables. Sus vigas perforadas, conectores, ejes y pines permiten montar soportes, marcos, guías y separadores sin tener que fabricar piezas desde cero.
Además, este proyecto tiene una parte claramente educativa. Usar LEGO Technic permite que el montaje sea más visual y fácil de entender. Los alumnos podrán ver claramente cómo están organizados los elementos, cómo se separan las zonas y cómo se puede rediseñar una estructura cuando algo no funciona como esperábamos.
No se trata de usar LEGO como un juguete, sino como una herramienta de prototipado.
Ventajas de esta solución
Usar LEGO Technic puede aportar varias ventajas importantes:
Ventaja
Explicación
Modularidad
Permite cambiar la distribución sin rehacer todo el montaje
Accesibilidad
No requiere herramientas complejas
Reutilización
Las piezas se pueden desmontar y volver a usar
Rapidez
Se pueden probar ideas de forma muy ágil
Diseño por niveles
Permite crear pisos y soportes elevados
Organización
Facilita guiar cables y separar zonas
Visual
Ayuda a explicar el diseño a los alumnos
Didáctico
Muestra el proceso de prototipado y mejora continua
Una de las grandes ventajas es que no necesito acertar con el diseño a la primera. Puedo montar una primera versión, comprobar si cabe todo, ver si los cables llegan bien, probar la ventilación y después modificar lo necesario.
Límites de esta solución
También hay que ser realista. LEGO Technic no sirve para todo.
No debe utilizarse como soporte principal de elementos peligrosos, pesados o que puedan calentarse mucho. Tampoco debe usarse como protección eléctrica para la zona de 230 V.
Esto es importante:
LEGO Technic puede servir para ordenar, separar, elevar y sujetar elementos ligeros, pero no debe ser la base de la seguridad eléctrica del proyecto.
Por tanto, usaré LEGO principalmente para:
crear soportes;
elevar placas;
guiar cables;
hacer marcos;
crear pisos;
organizar zonas;
facilitar el desmontaje;
mejorar la presentación visual.
Pero evitaré depender solo de LEGO para:
sujetar la fuente de alimentación si pesa bastante;
proteger conexiones de 230 V;
fijar elementos que soporten tirones;
sujetar discos duros mecánicos sin apoyo adicional;
colocar piezas junto a zonas con mucho calor;
soportar elementos que puedan moverse durante el transporte.
Para estos casos, usaré refuerzos adicionales: tornillos, bridas, velcro industrial, separadores, soportes metálicos o piezas específicas.
Prototipo Generado con IA
Diseño general de la maleta
La maleta que voy a utilizar es más parecida a una maleta rígida de aluminio o herramientas que a una maleta tipo militar o Pelican. Esto condiciona bastante el diseño.
Este tipo de maleta suele tener:
fondo relativamente plano;
tapa con cierta profundidad;
paredes interiores no demasiado gruesas;
bisagras metálicas;
cierres frontales;
asa de transporte;
interior acolchado o revestido.
La idea será aprovechar tanto el fondo como la tapa.
Prototipo generado con IA
Fondo de la maleta
En el fondo colocaré los elementos que necesitan mayor estabilidad o que pesan más:
fuente de alimentación;
caja de fusibles;
distribución de 12 V;
conversores de voltaje;
Raspberry Pi;
discos SSD o HDD;
hub USB;
cableado principal.
El fondo será la zona principal de trabajo técnico. Aquí estará la mayor parte de la electrónica y la distribución de alimentación.
Una posible distribución inicial sería:
FONDO DE LA MALETA
┌──────────────────────────────────────────────┐ │ Fuente 12 V Caja de fusibles │ │ │ │ Conversores DC Raspberry Pi │ │ │ │ SSD / HDD Hub USB │ │ │ │ Zona libre para futuras ampliaciones │ └──────────────────────────────────────────────┘
Tapa de la maleta
En la tapa quiero colocar elementos más visibles o de acceso rápido:
pantalla;
router o punto de acceso;
switch;
posiblemente algún panel de conectores;
guías para cables Ethernet;
indicadores visuales;
etiquetas o esquema del sistema.
La tapa puede quedar muy bien para la parte más demostrativa del proyecto. Al abrir la maleta, lo primero que se verá será la pantalla, el router, el switch y las conexiones principales.
Aunque use LEGO Technic para organizar el montaje, no todo debe mezclarse en el mismo espacio. Una de las primeras decisiones será dividir la maleta en varias zonas funcionales.
Zona 1: alimentación de 230 V AC
Esta es la zona más delicada.
Aquí estarán:
entrada IEC de corriente;
interruptor general;
fusible de entrada;
enchufe interno para portátil, si finalmente lo incluyo;
entrada de la fuente de alimentación de 12 V.
Esta zona debe ir protegida, aislada y separada del resto.
No debe haber bornes expuestos ni cables sueltos de 230 V. Si incluyo un enchufe interno, debe ser un módulo fijo, correctamente sujeto y protegido.
Esta zona no debería depender de LEGO como protección principal.
ZONA 230 V AC
Entrada IEC │ ├── Enchufe interno para portátil │ └── Fuente AC/DC 12 V
Zona 2: distribución de 12 V DC
Desde la fuente de alimentación saldrá una línea de 12 V DC que irá a una caja de fusibles.
Aquí se repartirán las salidas hacia:
router;
switch;
ventiladores;
conversor 12 V a 5 V para Raspberry;
pantalla, si usa 12 V;
otros módulos.
Fuente 12 V │ └── Caja de fusibles │ ├── Router ├── Switch ├── Conversor Raspberry ├── Ventiladores └── Extras
Esta parte ya es de baja tensión, pero aun así debe estar bien ordenada y protegida.
Zona 3: computación y almacenamiento
Aquí estarán los elementos que ejecutarán servicios o almacenarán datos:
Raspberry Pi;
SSD;
disco duro;
hub USB;
posibles adaptadores;
tarjeta microSD accesible;
cables USB;
cable HDMI si se usa pantalla.
Esta zona debe estar ventilada y permitir acceso a puertos.
Zona 4: red
La zona de red incluirá:
router;
switch;
latiguillos Ethernet;
posibles puertos externos RJ45;
conexión con la Raspberry;
conexión con el portátil.
La idea es que la red sea clara y fácil de explicar.
Por ejemplo:
Router / AP │ └── Switch │ ├── Raspberry Pi ├── Puerto externo 1 ├── Puerto externo 2 └── Portátil del profesor
Montaje con planchas LEGO
El primer paso físico será colocar planchas base en la maleta.
Estas planchas funcionarán como una superficie modular sobre la que podré fijar estructuras.
Opciones de fijación
Para fijar las planchas a la maleta puedo usar varias opciones:
Sistema
Ventaja
Inconveniente
Cinta de doble cara fuerte
Fácil y rápida
Puede despegarse con calor
Velcro industrial
Desmontable
Añade grosor
Tornillos pequeños
Muy firme
Hay que taladrar
Adhesivo de montaje
Fuerte
Difícil de retirar
Bridas
Reversible si hay puntos de paso
Depende de la maleta
Mi idea inicial sería usar velcro industrial o una fijación que permita retirar las planchas si el diseño cambia.
No quiero hacer un pegado definitivo demasiado pronto. El proyecto todavía está en fase de diseño y seguramente habrá modificaciones.
Fondo con planchas LEGO
En el fondo colocaría una o varias planchas ajustadas al tamaño de la maleta.
Sobre ellas se podrán montar:
soportes para Raspberry;
bases para SSD;
guías de cableado;
zonas elevadas;
topes laterales;
estructuras de separación.
Ejemplo:
Base de la maleta │ ├── Velcro industrial │ ├── Plancha LEGO │ ├── Estructura Technic │ └── Dispositivos
Tapa con planchas LEGO
La tapa es más delicada porque todo lo que se coloque ahí estará en vertical cuando la maleta esté abierta.
Para la tapa, usaría LEGO Technic solo con elementos ligeros o bien reforzados.
Podrían ir ahí:
pantalla ligera;
router pequeño;
switch pequeño;
guías de cables;
soportes visuales;
etiquetas.
Si algún elemento pesa mucho, no confiaría solo en LEGO. Usaría tornillos, bridas o velcro industrial adicional.
Soportes para componentes
Cada componente necesita una solución distinta. No es lo mismo sujetar una Raspberry que un router o un disco duro.
Soporte para Raspberry Pi
La Raspberry Pi no debería ir directamente apoyada sobre la base.
La colocaría elevada con separadores para que:
no toque superficies;
circule aire por debajo;
los puertos queden accesibles;
se pueda desmontar;
no haya riesgo de cortocircuito.
La estructura podría ser:
Raspberry Pi │ ├── Tornillos M2.5 ├── Separadores de nylon ├── Plataforma LEGO Technic └── Base LEGO
Lo ideal sería usar los agujeros de montaje de la Raspberry con tornillos M2.5 y separadores de nylon.
LEGO puede servir como plataforma, pero la placa debería ir fijada con tornillos adecuados, no simplemente encajada a presión.
Soporte para router
El router puede colocarse de varias formas.
Opción 1: marco lateral
Crear un marco Technic que impida que se desplace.
Si el switch va en la tapa, reforzaría la sujeción con velcro o bridas.
Soporte para SSD
Un SSD pesa poco y no genera demasiado calor, por lo que puede fijarse bastante bien.
Opciones:
velcro industrial;
marco LEGO;
bridas suaves;
soporte elevado.
Si uso un SSD externo por USB, me interesa que pueda retirarse fácilmente. En ese caso usaría velcro o un marco desmontable.
Soporte para disco duro mecánico
Si uso un HDD mecánico, tendría más cuidado.
Un disco mecánico es más sensible a golpes y vibraciones. Además pesa más que un SSD.
Para un HDD usaría:
base acolchada;
sujeción con velcro fuerte;
topes laterales;
posición estable en el fondo, no en la tapa;
evitar que quede colgando;
evitar golpes durante el transporte.
Sinceramente, para este proyecto me parece más adecuado usar SSD que HDD mecánico.
Soporte para pantalla
La pantalla probablemente será uno de los elementos más visibles.
Si va en la tapa, hay que tener en cuenta:
peso;
grosor;
alimentación;
cable HDMI o USB;
ángulo de visión;
protección al cerrar la maleta;
posibilidad de golpes.
La pantalla debería ir en un soporte más robusto que el resto. LEGO puede ayudar a posicionarla, pero seguramente convenga reforzarla con velcro industrial, tornillos o una pieza rígida adicional.
Una posible solución:
Tapa de la maleta │ ├── Plancha base ├── Marco Technic ├── Velcro industrial └── Pantalla
También hay que dejar espacio para que al cerrar la maleta la pantalla no choque con los elementos del fondo.
Diseño por niveles
Prototipo generado con IA
Una de las mejores ventajas de LEGO Technic es que permite crear estructuras por niveles.
Esto puede ayudar mucho en una maleta donde el espacio es limitado.
Nivel inferior
En el nivel inferior podría ir:
cableado principal;
conversores DC-DC;
distribución de 12 V;
ventiladores pequeños;
canalización.
Nivel intermedio
En el nivel intermedio:
Raspberry Pi;
SSD;
hub USB;
módulos auxiliares.
Nivel superior
En el nivel superior:
router;
switch;
pantalla;
conectores accesibles.
Un ejemplo:
NIVEL 3: Pantalla / Router / Switch ─────────────────────────────────── NIVEL 2: Raspberry / SSD / Hub ─────────────────────────────────── NIVEL 1: Fuente / Fusibles / Conversores ─────────────────────────────────── BASE LEGO
Este diseño permite esconder algunos cables por debajo y dejar visibles los elementos que interesa enseñar.
Pero hay que tener cuidado: demasiados niveles pueden complicar el mantenimiento.
La regla debería ser:
Todo componente importante debe poder desmontarse sin tener que desmontar media maleta.
Organización de cables
El cableado será una de las partes más importantes del proyecto.
Una maleta de laboratorio puede quedar muy atractiva por fuera, pero si por dentro los cables están desordenados, será difícil de mantener y de explicar.
LEGO Technic puede ayudar mucho a crear guías, canales y separadores.
Tipos de cableado
Dentro de la maleta habrá varios tipos de cables:
Tipo de cable
Uso
230 V AC
Entrada de corriente y enchufe interno
12 V DC
Router, switch, ventiladores, conversores
5 V DC
Raspberry y algunos módulos
Ethernet
Red entre router, switch y Raspberry
USB
SSD, hub, periféricos
HDMI
Pantalla
Sensores
Señales de baja corriente
Estos cables no deberían ir mezclados sin criterio.
Separación recomendada
Una buena organización podría ser:
Lateral izquierdo: - Alimentación DC
Zona central: - Raspberry / SSD / hub
Lateral derecho: - Ethernet
Zona aislada: - 230 V AC
O también:
Parte inferior: - Alimentación
Parte superior: - Red
Centro: - Computación
Lo importante no es la distribución exacta, sino que sea coherente y documentada.
Colores recomendados
Usar colores ayuda mucho.
Cable
Color recomendado
12 V positivo
Rojo
12 V negativo
Negro
5 V positivo
Rojo
5 V negativo
Negro
Ethernet
Azul
USB
Negro
HDMI
Negro
Señales/sensores
Amarillo, verde o blanco
230 V AC
Cable homologado, claramente separado
No siempre se podrá elegir el color de todos los cables, pero sí podemos etiquetarlos.
Otra idea es crear pequeños “puentes” para que los cables pasen por debajo de un nivel superior sin quedar aplastados.
Nivel superior ────────────── Cable pasa por debajo ════════════════════════ Base LEGO
Sujeción durante el transporte
No basta con que los componentes queden bien cuando la maleta está abierta sobre una mesa. También deben aguantar el transporte.
Durante el transporte pueden aparecer:
vibraciones;
golpes;
movimientos laterales;
cables que tiran;
conectores que se aflojan;
piezas que se sueltan.
Por eso, cada elemento debería superar una prueba básica:
Si muevo suavemente la maleta cerrada, nada importante debería desplazarse.
Para eso usaré una combinación de:
topes LEGO;
bridas;
velcro industrial;
tornillos;
separadores;
espumas protectoras si hace falta.
Cuidado con la tapa
Los elementos montados en la tapa tienen más riesgo de moverse o caer.
Por tanto, en la tapa usaré preferentemente:
piezas ligeras;
elementos bien fijados;
cableado con holgura;
soportes reforzados;
nada que pueda caer sobre la Raspberry o la fuente.
Si coloco la pantalla en la tapa, tendrá que ir especialmente bien sujeta.
Ventilación
La ventilación será otro punto clave.
Dentro de la maleta habrá elementos que generan calor:
fuente de alimentación;
Raspberry Pi;
router;
switch;
conversores DC-DC;
discos;
pantalla.
Una maleta cerrada no es una caja ideal para electrónica. Por eso habrá que prever circulación de aire.
Posible diseño de ventilación
Una opción sencilla:
Entrada de aire frío ─────► interior ─────► salida de aire caliente rejilla ventilador
Colocaría al menos:
una rejilla de entrada;
una rejilla de salida;
un ventilador de 12 V;
filtro antipolvo si es posible.
El ventilador puede alimentarse desde la línea de 12 V con su propio fusible.
LEGO y calor
LEGO es plástico. No debe estar pegado a elementos que se calienten mucho.
Hay que evitar colocar piezas LEGO justo encima o pegadas a:
disipadores;
fuente de alimentación;
zonas de ventilación;
reguladores de voltaje;
routers calientes;
pantalla si se calienta por detrás.
La regla es simple:
LEGO puede organizar la estructura, pero el calor necesita espacio.
Seguridad eléctrica
Esta parte no se puede tomar a la ligera.
Aunque la mayoría del montaje funcione a 12 V o 5 V, habrá una entrada de 230 V AC. Además, si incluyo un enchufe interno para conectar un portátil, habrá una derivación de red dentro de la maleta.
Normas básicas que seguiré
La zona de 230 V irá separada del resto.
No habrá bornes de 230 V expuestos.
La entrada de corriente tendrá fusible e interruptor.
El enchufe interno irá fijo, no suelto.
La fuente de alimentación irá bien anclada.
Se usará cable adecuado para 230 V.
La tierra se conectará correctamente cuando corresponda.
La parte DC tendrá fusibles por línea.
Antes de conectar equipos, se medirá voltaje y polaridad.
No se usarán cables Dupont o de Arduino para alimentación de potencia.
Lo que no haré
No quiero que el proyecto acabe en una chapuza peligrosa. Por tanto, evitaré:
regletas sueltas dentro de la maleta;
empalmes sin protección;
230 V pasando junto a cables de señal;
fuentes sin ventilación;
cables finos para alimentar Raspberry;
dispositivos sin fusible;
conectores sin etiquetar;
piezas móviles que puedan tocar bornes;
cerrar la maleta con elementos presionando cables.
Cable adecuado
El cable típico de Arduino sirve para señales y sensores, pero no para alimentar la maleta.
Para este montaje usaré cables de sección adecuada.
Tramo
Cable recomendado
230 V AC
Cable homologado 3 x 1,5 mm²
Fuente 12 V a caja de fusibles
1,5 mm² o 2,5 mm²
Caja de fusibles a router
0,75 mm²
Caja de fusibles a switch
0,75 mm²
Caja de fusibles a conversor Raspberry
0,75 mm² o 1 mm²
Ventiladores
0,5 mm² o 0,75 mm²
Sensores
Cable fino tipo Arduino, solo para señal
La Raspberry es especialmente sensible a las caídas de tensión. Por eso el tramo de 5 V debe ser corto y de buena calidad.
Alimentación prevista
El diseño de alimentación inicial será algo parecido a esto:
Entrada 230 V AC │ ├── Enchufe interno para portátil │ └── Fuente 230 V AC → 12 V DC │ └── Caja de fusibles 12 V │ ├── Router 12 V / 1 A ├── Switch 12 V / 1 A ├── Conversor 12 V → 5 V → Raspberry ├── Ventiladores 12 V └── Extras
Cada línea tendrá su propio fusible.
Valores orientativos:
Línea
Fusible orientativo
Router 12 V / 1 A
2 A
Switch 12 V / 1 A
2 A
Conversor Raspberry
3 A
Ventiladores
1 A
LED / voltímetro
1 A
Estos valores podrán ajustarse en función de los consumos reales.
Documentación del proceso
Una parte fundamental del proyecto será documentar todo el proceso.
No quiero limitarme a enseñar la maleta terminada. Quiero enseñar cómo se ha ido construyendo, qué decisiones se han tomado, qué errores han aparecido y qué cambios han sido necesarios.
Esta segunda fase se presta mucho a documentación visual.
Fotografías que quiero hacer
Durante esta fase documentaré:
la maleta vacía;
las planchas LEGO antes de colocarlas;
primera prueba de distribución;
colocación provisional de router, switch y Raspberry;
soporte de la Raspberry;
soporte del switch;
soporte del router;
zona de alimentación;
caja de fusibles;
guías de cableado;
prueba de cierre de la maleta;
primera versión completa sin alimentar;
modificaciones después de detectar problemas.
Qué explicar en cada foto
Cada foto debería ir acompañada de una explicación breve:
qué se está probando;
por qué se ha colocado ahí;
qué problema resuelve;
qué inconvenientes tiene;
qué habría que mejorar;
si es una solución provisional o definitiva.
Esto es muy importante porque convierte el proyecto en una experiencia de aprendizaje, no solo en una galería de fotos.
Propuesta de fases para esta segunda parte
Para no convertir el montaje en un caos, dividiré esta fase en varias iteraciones.
Iteración 1: distribución sin fijar nada
Primero colocaré todos los componentes dentro de la maleta sin fijarlos.
Objetivo:
comprobar si caben;
ver si la tapa cierra;
observar accesos a puertos;
detectar zonas conflictivas;
decidir qué va en el fondo y qué va en la tapa.
Preguntas que quiero responder:
¿Cabe todo? ¿La maleta cierra? ¿Hay espacio para cables? ¿Se puede acceder a los puertos? ¿Dónde irá la ventilación? ¿Dónde irá la zona de 230 V?
Iteración 2: colocación de planchas LEGO
Después colocaré las planchas base.
Primero intentaré hacerlo de forma reversible, probablemente con velcro industrial o un sistema que pueda modificar.
Objetivo:
crear una superficie modular;
comprobar si las piezas encajan bien;
decidir si hace falta recortar o ajustar;
ver si el grosor añadido afecta al cierre.
Iteración 3: soportes provisionales
Construiré soportes iniciales para:
Raspberry Pi;
router;
switch;
SSD;
caja de fusibles;
conversores.
En esta fase no me preocuparé demasiado por el acabado final. Lo importante será validar el diseño.
Iteración 4: rutas de cableado
Antes de conectar nada definitivamente, diseñaré los caminos de los cables.
Separaré:
alimentación;
red;
USB;
HDMI;
sensores;
230 V.
Objetivo:
evitar cruces innecesarios;
dejar holgura;
no forzar conectores;
permitir desmontaje;
mejorar la limpieza visual.
Iteración 5: prueba de cierre
Con todos los elementos colocados, cerraré la maleta sin alimentar nada.
Esta prueba es fundamental.
Hay que comprobar:
si la pantalla choca con algo;
si los cables se aplastan;
si la Raspberry queda presionada;
si el router o switch tocan la tapa;
si algún conector queda forzado;
si los soportes aguantan.
Iteración 6: cableado de baja tensión
Después empezaré con la parte de 12 V y 5 V.
Primero sin conectar los dispositivos finales. Mediré con multímetro:
salida de la fuente;
polaridad;
salida de cada fusible;
salida del conversor 12 V a 5 V.
Solo después conectaré router, switch y Raspberry.
Iteración 7: pruebas de funcionamiento
Una vez alimentados los equipos, comprobaré:
arranque de la Raspberry;
funcionamiento del router;
funcionamiento del switch;
conexión de red;
acceso desde portátil;
temperatura después de un rato;
estabilidad de alimentación;
posibles reinicios o fallos.
Iteración 8: acabado y etiquetado
Cuando todo funcione, llegará el momento de ordenar y etiquetar.
Añadiré:
etiquetas en cables;
etiquetas en fusibles;
etiquetas en conectores;
indicaciones de voltaje;
esquema interno;
versión del montaje.
Me gustaría que al abrir la maleta se pueda entender qué es cada cosa.
Materiales previstos para esta fase
Una lista inicial de materiales podría ser:
Material
Uso
Planchas base LEGO o compatibles
Forrar fondo y tapa
Vigas LEGO Technic
Estructuras y soportes
Pines Technic
Uniones desmontables
Ejes Technic
Refuerzo
Escuadras Technic
Soportes en ángulo
Bricks básicos
Topes y separadores
Velcro industrial
Sujeción desmontable
Bridas pequeñas
Sujeción de cables
Bridas reutilizables
Pruebas y prototipado
Separadores de nylon
Elevar Raspberry y placas
Tornillos M2.5 / M3
Fijar placas
Etiquetas adhesivas
Identificación
Canaleta pequeña
Guiado opcional de cables
Cinta de doble cara fuerte
Fijación auxiliar
Gomas o espuma fina
Protección antivibración
Herramientas necesarias
No quiero que esta fase dependa de herramientas complejas.
Probablemente usaré:
Herramienta
Uso
Destornilladores pequeños
Tornillos y soportes
Alicates de corte
Cortar bridas
Multímetro
Medir voltajes
Cúter
Ajustes ligeros
Regla o metro
Medir distribución
Rotulador
Marcas provisionales
Crimpadora
Terminales eléctricos
Pelacables
Preparar cableado
Taladro pequeño
Solo si finalmente fijo algo con tornillos
La idea es mantener el montaje dentro de algo asumible y replicable.
Riesgos y problemas esperados
Es importante anticipar problemas.
1. Que las piezas se suelten
LEGO encaja bien, pero si la maleta se mueve mucho, algunas piezas podrían soltarse.
Solución:
reforzar estructuras;
usar bridas;
usar velcro;
no depender de una sola unión;
probar transporte antes de darlo por válido.
2. Que la tapa no cierre
Al añadir niveles, cables y soportes, puede que la maleta deje de cerrar correctamente.
Solución:
hacer pruebas frecuentes de cierre;
no esperar al final;
dejar margen de altura;
evitar cables cruzando por zonas de presión.
3. Que se acumule calor
Una estructura compacta puede dificultar la ventilación.
Solución:
dejar huecos;
no encerrar la fuente;
añadir ventiladores;
medir temperatura;
no cubrir rejillas de router/switch.
4. Que el cableado quede bonito pero poco mantenible
A veces se ordenan tanto los cables que luego no se puede desmontar nada.
Solución:
dejar holgura;
usar bridas reutilizables en la fase inicial;
etiquetar;
no ocultar completamente los cables críticos;
poder sacar la Raspberry sin desmontar toda la maleta.
5. Que LEGO no sea suficiente para elementos pesados
Algunos componentes pueden necesitar sujeción más fuerte.
Solución:
usar LEGO como guía o posicionamiento;
reforzar con tornillos, velcro industrial o bridas;
colocar elementos pesados en el fondo, no en la tapa.
Posibles ampliaciones futuras
El uso de LEGO Technic deja abierta la puerta a muchas ampliaciones:
añadir otra Raspberry;
incluir un pequeño panel de sensores;
montar una pantalla diferente;
añadir un ventilador adicional;
colocar puertos RJ45 externos;
integrar un medidor de consumo;
añadir luces de estado;
preparar soportes para pendrives o tarjetas microSD;
crear una zona para Arduino;
montar un pequeño panel de control.
El diseño no queda cerrado desde el principio, que es precisamente lo que busco.
Primer diseño conceptual
Una primera versión del interior podría ser:
TAPA ┌──────────────────────────────────────────────┐ │ Pantalla │ │ │ │ Router/AP Switch │ │ │ │ Guía de cables Ethernet │ └──────────────────────────────────────────────┘
FONDO ┌──────────────────────────────────────────────┐ │ Fuente 12 V Caja fusibles │ │ │ │ Conversores Raspberry Pi │ │ │ │ SSD / Hub USB Canalización de cables │ └──────────────────────────────────────────────┘
Otra opción sería dejar la tapa solo para pantalla y cableado ligero:
TAPA ┌──────────────────────────────────────────────┐ │ Pantalla │ │ Panel visual / esquema │ │ Guías de cables │ └──────────────────────────────────────────────┘
Todavía no tengo decidido el diseño final. La elección dependerá del tamaño real de la maleta, la altura disponible y cómo cierren los elementos.
Decisiones importantes de esta fase
Antes de avanzar, tengo que decidir varias cosas:
¿Qué elementos irán en la tapa?
¿Qué elementos irán en el fondo?
¿Dónde irá la zona de 230 V?
¿Dónde irá la fuente de alimentación?
¿Cómo entrará y saldrá el aire?
¿Dónde irán los puertos de red accesibles?
¿La pantalla será fija o desmontable?
¿Usaré SSD o HDD?
¿Cuántos niveles tendrá la estructura?
¿Qué partes serán definitivas y cuáles provisionales?
Estas decisiones no tienen que resolverse todas de golpe. El proyecto irá avanzando por pruebas.
Conclusión
En esta segunda fase del proyecto he decidido centrarme en el diseño físico del laboratorio móvil.
La solución elegida será utilizar LEGO Technic y planchas base para crear una estructura modular dentro de la maleta. Esto me permitirá ir montando soportes, niveles y guías de cableado sin necesidad de fabricar piezas a medida desde el principio.
No es una solución industrial ni pretende serlo. Es una solución práctica, flexible y educativa. Me permitirá avanzar sin bloquearme por no tener conocimientos de carpintería o mecanizado, y además facilitará que el proceso sea visual y fácil de explicar.
Eso sí, habrá límites claros: la parte de 230 V tendrá que estar correctamente protegida, los elementos pesados necesitarán sujeción adicional y el cableado de alimentación deberá hacerse con materiales adecuados.
El objetivo de esta fase no es dejar la maleta terminada, sino construir la primera versión del chasis interno: una base modular sobre la que seguir creciendo.
A partir de aquí, el siguiente paso será comenzar las pruebas reales de distribución: colocar las planchas, presentar los componentes, comprobar alturas, pensar rutas de cableado y empezar a construir los primeros soportes.
Montaje de una maleta-laboratorio con router, mini PC, pantalla y alimentación integrada
En este artículo voy a documentar el proceso de montaje de una maleta técnica pensada para funcionar como laboratorio portátil de redes, servidores y pruebas con pequeños dispositivos.
La idea era crear una especie de maleta-laboratorio, donde poder integrar varios elementos de red y computación en un único espacio transportable:
Un router Xiaomi AX3600 desmontado.
Un mini PC o placa de servidor.
Una pantalla integrada en la tapa.
Una fuente de alimentación interna.
Un sistema de distribución eléctrica.
Ventilación forzada mediante ventiladores.
Espacio modular para futuras ampliaciones.
Superficie interior preparada con placas tipo LEGO para fijar componentes.
El objetivo no era simplemente meter dispositivos dentro de una caja, sino crear una estructura ordenada, ampliable y relativamente fácil de modificar.
1. La idea inicial
El proyecto parte de una maleta rígida de aluminio con el tamaño suficiente para alojar varios dispositivos. Este tipo de maleta resulta interesante porque ofrece rigidez estructural, tapa abatible, espacio interno aprovechable y facilidad para transportar todo el conjunto.
La intención era convertirla en una pequeña estación de trabajo portátil, útil para prácticas de redes, ciberseguridad, servidores, monitorización o simulación de infraestructura.
No se trata de un producto comercial terminado, sino de un proyecto artesanal, experimental y flexible, pensado para poder ir evolucionando con el tiempo.
2. Desmontaje del router Xiaomi AX3600
Uno de los primeros pasos fue desmontar el router Xiaomi AX3600 para poder integrarlo dentro de la maleta.
El router, en su formato original, ocupa bastante espacio debido a la carcasa y a la disposición de las antenas. Para aprovechar mejor el interior de la maleta, se retiró la carcasa y se dejó accesible la placa principal.
Durante el desmontaje se separaron los elementos principales del router:
La placa principal.
El disipador.
Los conectores internos de antena.
Las antenas externas.
La chapa metálica de soporte.
Los cables coaxiales internos.
Este paso permite reducir el volumen del dispositivo y facilita su integración dentro de una estructura personalizada.
Importante: Este tipo de modificación anula cualquier garantía del dispositivo y debe hacerse con mucho cuidado. Hay que evitar tirar de los cables de antena, doblar conectores o provocar cortocircuitos sobre la placa.
3. Separación de carcasa, antenas y placa principal
Una vez abierto el router, se separaron la carcasa superior, la carcasa inferior, las antenas, la placa principal y el soporte metálico.
La placa del router se mantuvo junto a su disipador y parte de la estructura metálica, ya que esto ayuda a conservar rigidez y facilita su posterior fijación dentro de la maleta.
Las antenas originales también se conservaron. En lugar de mantenerlas unidas a la carcasa del router, se recolocaron en otra zona de la maleta para aprovechar mejor el espacio disponible.
Este paso es delicado porque los cables de antena son finos y frágiles. No conviene doblarlos en exceso ni forzar los conectores pequeños que van unidos a la placa.
4. Preparación de la base interior de la maleta
Para poder fijar componentes dentro de la maleta, se preparó una base modular usando placas tipo LEGO.
Este sistema permite colocar, mover y reorganizar piezas sin tener que taladrar constantemente la maleta. Es una solución muy práctica para un proyecto que puede cambiar con el tiempo.
La base interior se dividió en varias zonas funcionales:
Zona de alimentación.
Zona de router o electrónica de red.
Zona para mini PC o placa principal.
Zona de ventilación.
Zona para distribución de cables.
Zona libre para ampliaciones.
El uso de una superficie modular permite probar distintas distribuciones antes de fijar los elementos de forma definitiva. También facilita futuras modificaciones, como añadir una Raspberry Pi, un switch, sensores, más conectores o nuevos módulos.
5. Corte de huecos para ventilación
Uno de los puntos más importantes del proyecto fue la refrigeración. Al meter electrónica dentro de una maleta cerrada, el calor puede acumularse rápidamente.
Por este motivo se prepararon varios huecos para ventiladores. La intención era crear circulación de aire dentro del conjunto y evitar que la temperatura aumentase demasiado durante el uso.
El sistema de ventilación se planteó con tres ideas principales:
Permitir la entrada de aire fresco.
Facilitar la salida de aire caliente.
Mover el aire interno para evitar zonas de calor acumulado.
En este tipo de montaje conviene decidir bien el sentido del flujo de aire. No basta con poner ventiladores sin más. Si todos meten aire, puede faltar salida. Si todos sacan aire, puede faltar entrada. Lo recomendable es combinar entrada y salida para crear un flujo continuo.
6. Instalación de la pantalla en la tapa
Otro elemento importante del proyecto fue la instalación de una pantalla en la tapa de la maleta.
La pantalla permite usar la maleta sin depender siempre de un monitor externo. Puede servir para mostrar la consola del sistema, una interfaz gráfica, información de estado, dashboards de monitorización o herramientas de administración.
Integrar la pantalla en la tapa convierte esa parte de la maleta en una especie de panel de control. Además, deja libre la base para la fuente de alimentación, el mini PC, el cableado y otros dispositivos.
La pantalla se fijó en una zona visible y accesible, dejando espacio alrededor para conectores, botones, indicadores u otros elementos que puedan añadirse más adelante.
7. Colocación de conectores y acceso exterior
Además de la pantalla, se prepararon zonas de acceso para conectores y controles.
La idea de sacar conectores al panel es muy útil porque evita tener que manipular directamente las placas internas cada vez que se quiere conectar algo.
En un montaje de este tipo conviene dejar accesibles elementos como:
Entrada de alimentación.
Interruptor general.
Puertos Ethernet.
Puertos USB.
HDMI, si se necesita.
Conexión de pantalla.
Botones de encendido.
Indicadores luminosos.
Salidas de 5 V o 12 V, si se quieren usar.
Diseñar bien los accesos desde el principio evita tener que abrir la maleta constantemente para conectar o desconectar dispositivos.
8. Instalación del conector IEC con interruptor
Para alimentar la maleta se instaló un conector IEC con interruptor. Este tipo de conector es habitual en ordenadores, fuentes de alimentación y equipos electrónicos.
El conector permite tener una entrada de corriente más limpia y segura que un cable suelto. Además, al incluir interruptor, se puede encender y apagar toda la maleta desde un único punto.
Este elemento se pensó como entrada principal de alimentación del proyecto.
Aviso de seguridad: La parte de 230 V debe estar muy bien aislada, protegida y fijada. No debe quedar ningún terminal expuesto. Es recomendable usar funda termorretráctil, conectores faston aislados, clemas adecuadas, fusible y toma de tierra si la fuente y la estructura lo requieren.
En esta fase es importante separar claramente la zona de alta tensión de la zona de baja tensión. La entrada de 230 V debe quedar protegida y no mezclarse con cables de datos o electrónica de bajo voltaje.
9. Fuente de alimentación y distribución eléctrica
La fuente de alimentación se instaló en la base de la maleta, separada del resto de componentes principales.
Su función es convertir la entrada de corriente alterna en salidas de corriente continua, que después se pueden distribuir a los distintos elementos del montaje.
Desde la fuente se llevó la alimentación a una bornera o bloque de distribución. Esto permite repartir energía de forma más ordenada a distintos dispositivos:
Router.
Ventiladores.
Convertidores DC-DC.
Mini PC o placa.
Pantalla.
Otros módulos internos.
El uso de una bornera de distribución evita empalmes improvisados y facilita el mantenimiento. Cada línea puede salir desde un punto concreto, con positivo y negativo claramente identificados.
Lo ideal es que cada salida importante tenga su propia protección, especialmente si se van a alimentar varios dispositivos desde la misma fuente.
10. Organización del cableado
Uno de los retos principales fue la organización del cableado.
A medida que se añaden elementos, aparecen cables de alimentación, cables USB, HDMI, Ethernet, antenas, ventiladores y conexiones internas. Si no se planifica bien, el interior puede volverse difícil de mantener.
Para mejorar la organización del cableado conviene seguir varias reglas:
Separar alimentación y datos.
Usar bridas pequeñas.
Etiquetar cables importantes.
Mantener colores coherentes.
Usar rojo para positivo.
Usar negro para negativo.
Evitar que los cables pasen por encima de disipadores.
Evitar que los cables puedan tocar ventiladores.
Dejar holgura suficiente para abrir y cerrar la tapa.
No tensar cables de antena ni conectores delicados.
Un cableado bien organizado no solo mejora la estética, también facilita detectar fallos, sustituir piezas y ampliar el proyecto.
11. Recolocación de las antenas del router
Una de las partes más importantes del montaje fue la recolocación de las antenas del router Xiaomi AX3600.
En lugar de mantener el router completo con su carcasa original, las antenas se distribuyeron por la tapa de la maleta. De esta manera se aprovecha mejor el espacio y se libera la base para otros componentes.
Las antenas se colocaron en una posición que permite conservar su función original y mantener una buena separación entre ellas. Esto es importante en un router con varias antenas, ya que su distribución influye en la cobertura y en el rendimiento inalámbrico.
Durante esta parte del montaje hay que cuidar especialmente los cables coaxiales. Son muy finos y no deben doblarse en ángulos bruscos. También hay que evitar que queden tirantes al abrir o cerrar la maleta.
12. Montaje de la placa del router en la maleta
La placa del router se integró dentro de la maleta junto con su disipador y parte de su soporte metálico.
La idea fue aprovechar el router como elemento principal de red, pero sin conservar la carcasa original. De esta forma se gana espacio y se puede colocar el hardware en una posición más adecuada para el conjunto.
La placa debe quedar bien sujeta y aislada. No debe tocar directamente superficies metálicas sin protección, porque podría producirse un cortocircuito.
Para fijar este tipo de placas conviene usar:
Separadores.
Tornillos adecuados.
Soportes plásticos.
Arandelas de nylon.
Bases no conductoras.
Piezas modulares.
Cinta aislante en zonas críticas.
También es importante que el disipador tenga espacio suficiente alrededor para evacuar calor.
13. Instalación del mini PC o placa principal
En la base de la maleta se instaló un mini PC o placa compacta que puede funcionar como servidor principal del proyecto.
Este equipo puede utilizarse para diferentes funciones, dependiendo del sistema operativo y de los servicios instalados:
Servidor Linux.
Proxmox.
Docker.
Portainer.
Servidor web.
Base de datos.
Monitorización.
Laboratorio de redes.
Nodo de ciberseguridad.
Panel de administración.
Este tipo de placa resulta muy adecuada para una maleta-laboratorio porque ocupa poco espacio, consume relativamente poco y ofrece muchas posibilidades.
En un contexto educativo, puede funcionar como servidor central para prácticas de clase, despliegue de servicios, pruebas de red o administración remota.
14. Posibles usos de la maleta-laboratorio
Una vez montada, la maleta puede tener muchos usos en clase o en un entorno de pruebas.
Laboratorio de redes
La maleta puede funcionar como pequeño centro de red portátil. Permite trabajar conceptos como:
Configuración IP.
DHCP.
DNS.
NAT.
Redes WiFi.
Segmentación de red.
Pruebas de conectividad.
Administración de router.
Acceso remoto.
Si en el futuro se añade un switch gestionable, también podría usarse para trabajar VLAN y escenarios de red más avanzados.
Laboratorio de ciberseguridad
También puede utilizarse como base para prácticas de ciberseguridad:
Monitorización de tráfico.
IDS con Suricata.
Wazuh.
Captura de paquetes.
Análisis con Wireshark.
Laboratorios con máquinas vulnerables.
Pruebas de firewall.
Segmentación de entornos.
La ventaja de tenerlo todo dentro de una maleta es que el entorno puede transportarse y desplegarse rápidamente.
Servidor portátil
El mini PC permite convertir la maleta en un pequeño servidor portátil.
Algunos servicios interesantes que podrían instalarse son:
Docker.
Portainer.
Nginx.
Apache.
MariaDB.
Grafana.
Prometheus.
Open WebUI.
Servicios internos para clase.
Esto permite llevar un entorno completo preparado sin depender de infraestructura externa.
Proyecto educativo
La propia construcción de la maleta ya es un proyecto educativo interesante.
Permite trabajar contenidos de:
Electricidad básica.
Electrónica.
Hardware.
Redes.
Refrigeración.
Seguridad.
Organización interna.
Documentación técnica.
Resolución de problemas.
Es un proyecto muy completo porque obliga a pensar tanto en la parte técnica como en la parte física del montaje.
15. Problemas y aprendizajes durante el montaje
Este tipo de proyecto no queda perfecto a la primera. Es normal tener que probar, desmontar, recolocar y corregir.
Algunos aprendizajes importantes del proceso fueron:
Antes de fijar nada definitivamente, conviene presentar todos los componentes.
El espacio interior se acaba antes de lo que parece.
El cableado ocupa mucho más de lo previsto.
La ventilación debe pensarse desde el principio.
Los conectores deben quedar accesibles.
Las piezas modulares ayudan mucho.
La alimentación debe planificarse con cuidado.
Conviene dejar margen para futuras ampliaciones.
La tapa también puede aprovecharse como zona de montaje.
La estética importa, pero la seguridad importa más.
Uno de los mayores aciertos fue usar placas tipo LEGO como superficie modular. Esta solución permite modificar el diseño sin rehacer completamente la estructura.
Investigación y caracterización técnica de sensores
Antes de integrar múltiples sensores en un sistema centralizado de adquisición de datos, es necesario comprender el comportamiento individual de cada módulo.
En esta actividad, cada grupo trabajará con un único sensor del kit basado en Arduino Mega 2560.
El objetivo no es simplemente “hacerlo funcionar”, sino:
Comprender qué magnitud física mide.
Analizar cómo genera la señal.
Probar su funcionamiento real.
Documentar técnicamente su comportamiento.
Proponer su integración futura en RaspiAlarm.
Cada grupo deberá:
Conectar el sensor al Arduino.
Desarrollar un programa mínimo funcional.
Obtener lecturas reales.
Documentar todo el proceso en un README técnico.
Entregar código y pruebas.
El resultado final de esta fase será un catálogo técnico de sensores que servirá como base para la arquitectura global del sistema.
📘 3️⃣ LISTA DE SENSORES DEL KIT (Asignación por grupo)
Utilizando exclusivamente material típico de un kit compatible con Arduino Mega 2560.
Lista propuesta:
Grupo 1 – Sensor DHT11 (Temperatura y Humedad) Grupo 2 – HC-SR04 (Ultrasonidos) Grupo 3 – Sensor PIR (Movimiento) Grupo 4 – Sensor de llama Grupo 5 – Sensor de sonido (KY-038) Grupo 6 – Sensor LDR (Luz) Grupo 7 – Sensor de humedad del suelo Grupo 8 – Sensor de inclinación (Tilt Switch)
Cada grupo solo puede trabajar con su sensor asignado.
📘 4️⃣ Almacenamiento de datos
Arduino Mega 2560 envíe datos por USB y que Windows los guarde automáticamente en el PC.
Nada de herramientas raras. Solo:
Windows
IDE de Arduino
Cable USB
Python (para capturar y guardar datos)
Arquitectura mental:
Sensor → Arduino → USB (Serial) → PC → Archivo CSV
Eso es adquisición de datos básica. Ciencia aplicada.

![PC-RETO 4: [Reto] – Implantación de un laboratorio histórico de ordenadores mediante emulación y virtualización](https://laaventuradeaprender.com/wp-content/uploads/2026/04/b5741e7b-6bee-4257-9381-7a23e7911dbf.png)